先進的なプロトタイピングは、ロボティクス分野におけるイノベーションの鼓動であり、エンジニア、デザイナー、発明家がアイデアを具体的な現実へと変えるためのダイナミックなプラットフォームを提供します。
これらのロボットは、ヘルスケア、製造、輸送、物流などさまざまな分野で活用されており、プロトタイピングは現実世界の課題に対するソリューションを生み出すうえで不可欠なステップです。ロボティクスのプロトタイピングは、製品改善を推進するだけでなく、潜在的なリスクの評価と管理においても重要な役割を果たします。
この記事では、ロボティクスのプロトタイピングにおける ProtoPie の実用的な活用方法を探ります。その機能を示すために、MedTech業界で一般的に使用される外科用ロボットアームのプロトタイプを作成します。ワイヤレスコントローラーを使って Arduino ロボットアームを制御する手順を、ProtoPie を活用しながらご紹介します!
概要
ロボットアームを準備する
ロボットアームを動かす方法
ワイヤレスコントローラーを接続する
ワイヤレスコントローラーを Arduino にブリッジする
UI にカメラ映像を統合する
それで完了です!外科用ロボットアームのプロトタイプが完成しました!
ロボティクスと MedTech の未来を形作る
💡注: 当社限定の Robotics & MedTech ウェビナーでは、このロボットアームのライブデモを紹介しました。参加できなかった方は、ぜひ録画をご覧ください。ProtoPie が設計プロセスをどのように効率化するか、そして効率的なプロトタイピングのための業界トップのベストプラクティスについての洞察を得られます。
1. ロボットアームを準備する
ProtoPie のロボティクスプロトタイピング機能について、多くのロボティクスおよび MedTech 企業からお問い合わせをいただいたため、私たちは一般的なユースケースのプロトタイプ方法を実演することにしました。
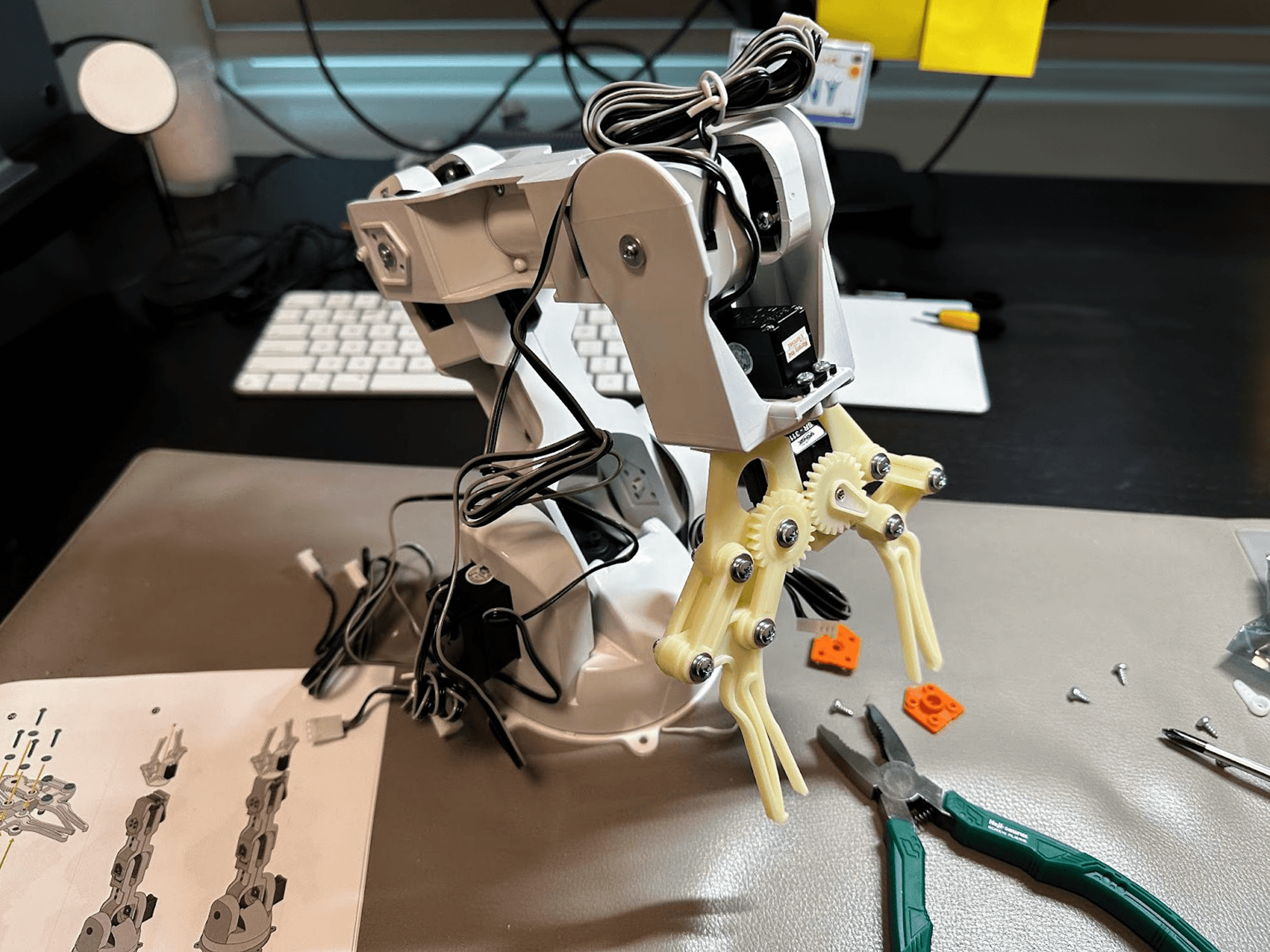
まず、外科用ロボットアームのプロトタイプを作成するために、Arduino Braccio ロボットアーム とワイヤレスゲームパッドコントローラーを購入しました。ロボットアームを「医療用ロボットアーム」の見た目にするため、各パーツを白く塗装しました。
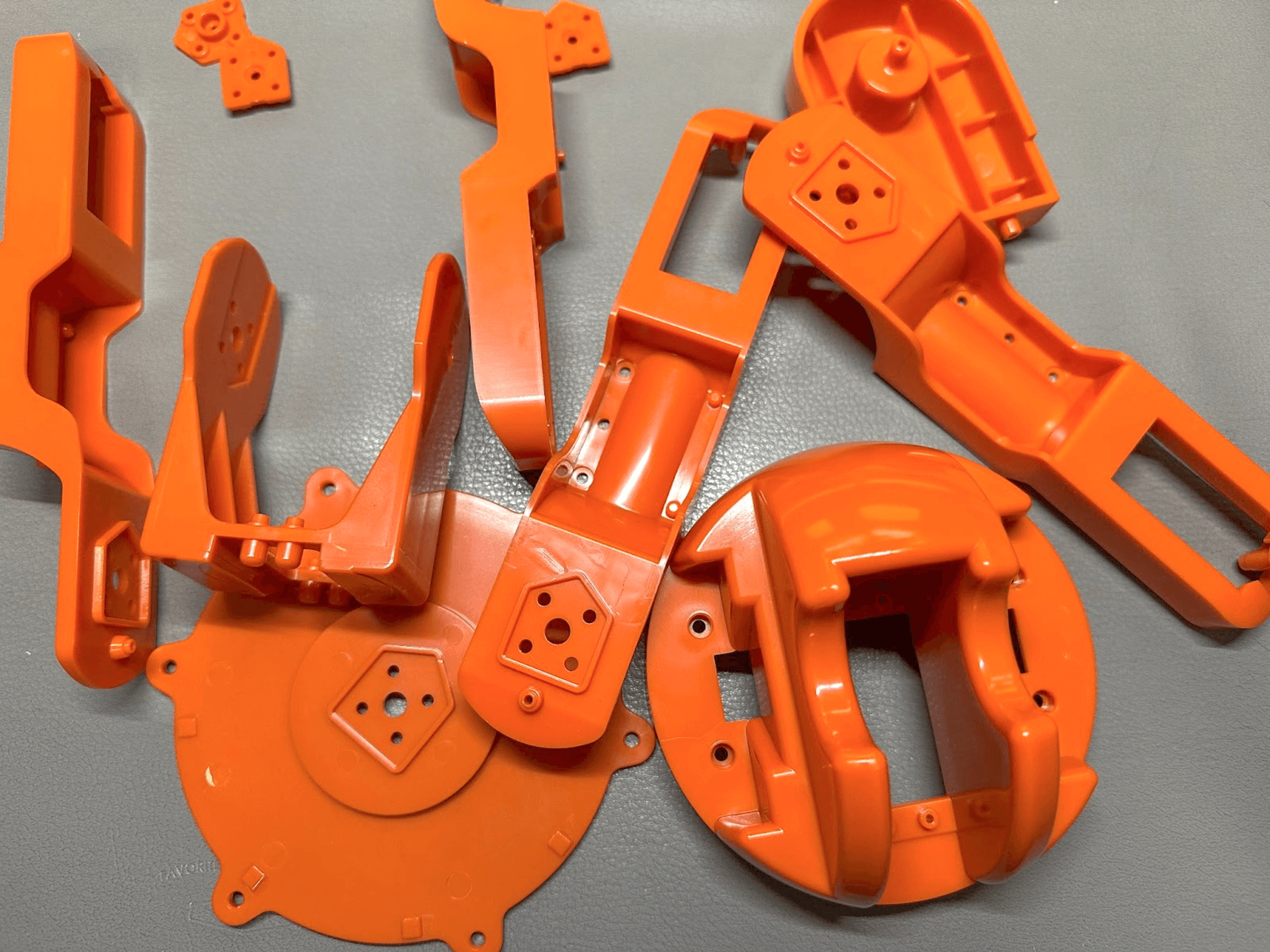
塗装前のロボットアーム。
まずはグレーの下地色から始めました。
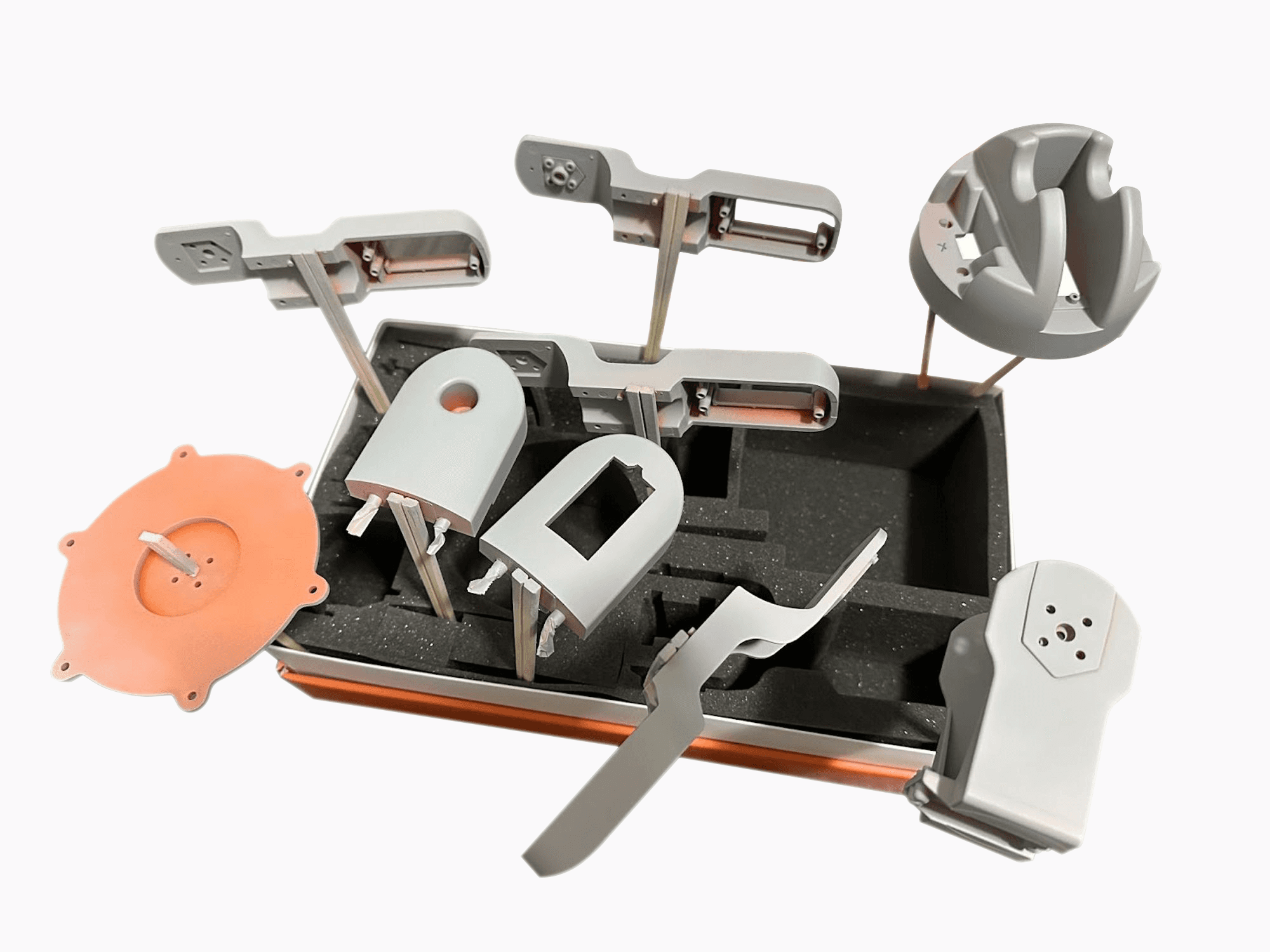
グレーの下地色でロボットアームを塗装しています。
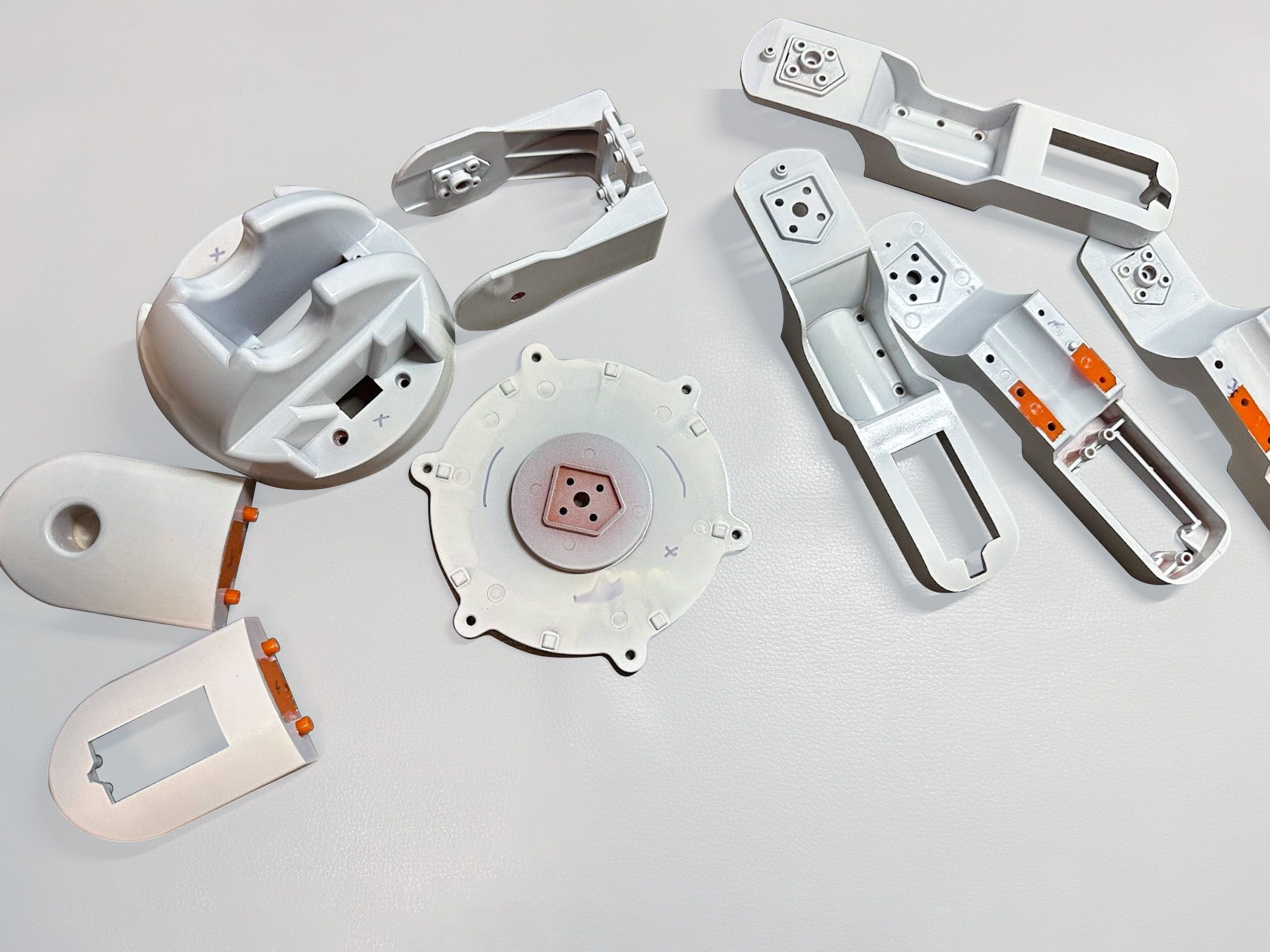
ロボットアームのパーツ。
最後に、ロボットアーム全体を白く塗装しました。ロボットアームの各パーツは、付属の説明書に従うことで簡単に組み立てられます。
白く塗装したロボットアームのプロトタイプ。
外科用ロボットには患者と周囲の環境を監視するためのカメラが搭載されているため、グリッパーの先端に USB カメラモジュールを取り付けました。このような USB カメラ はオンラインで簡単に購入できます。
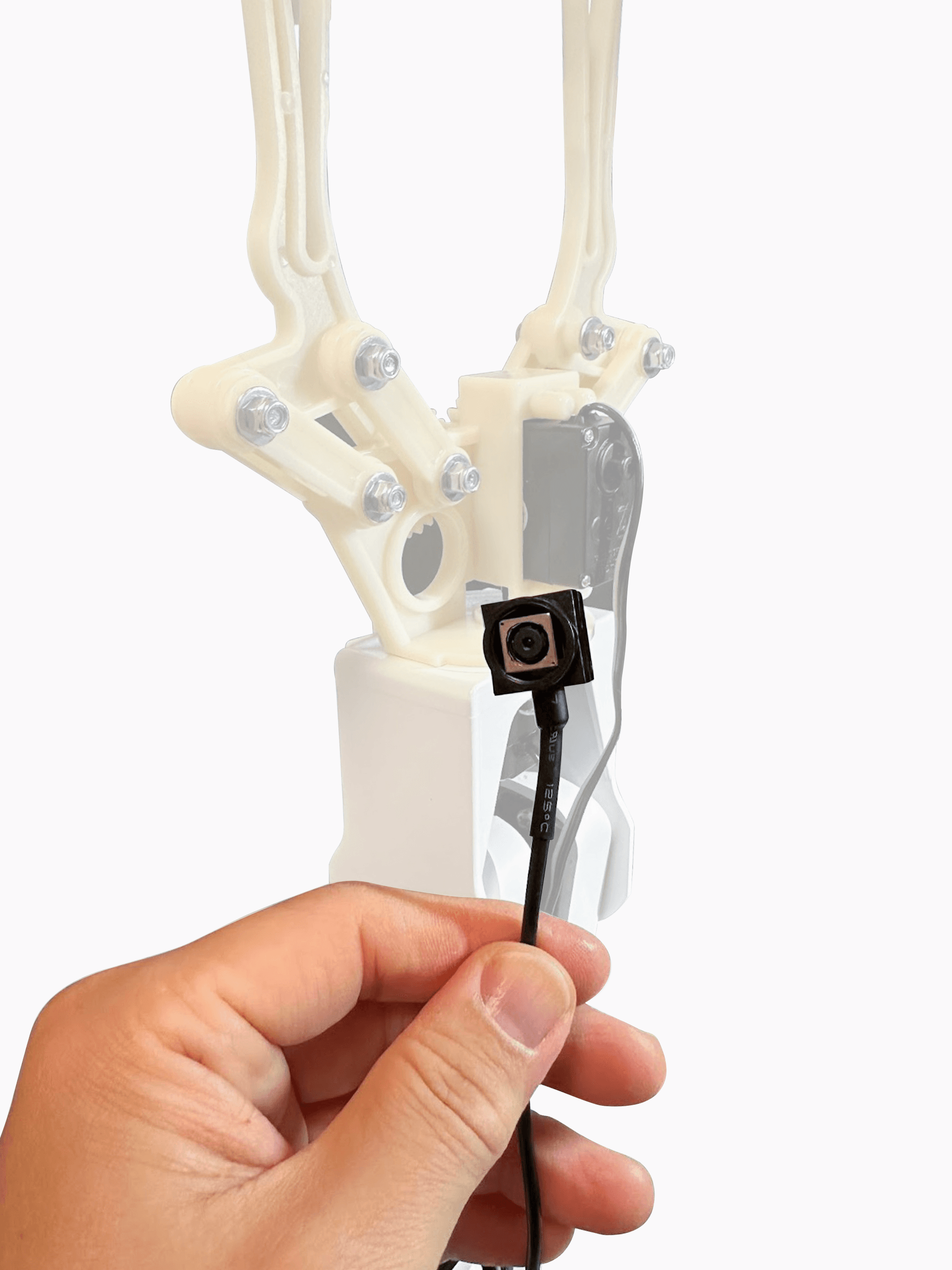
USBカメラ。
使用したロボットアームキットには Arduino ボードが含まれていなかったため、自分たちで用意する必要がありました。Arduino UNO R3 を使用し、ボードシールドと組み合わせて組み立てました。これで、この医療用プロトタイプのハードウェアは準備完了です。
2. ロボットアームを動かす方法
Arduino のサンプルコード を使って、ProtoPie Connect でメッセージを受信しながらロボットアームを制御できます。サンプルコードをコピーして Arduino ボードにアップロードするだけです。
詳しく学びたい方は、以下のリソースをご参照ください。
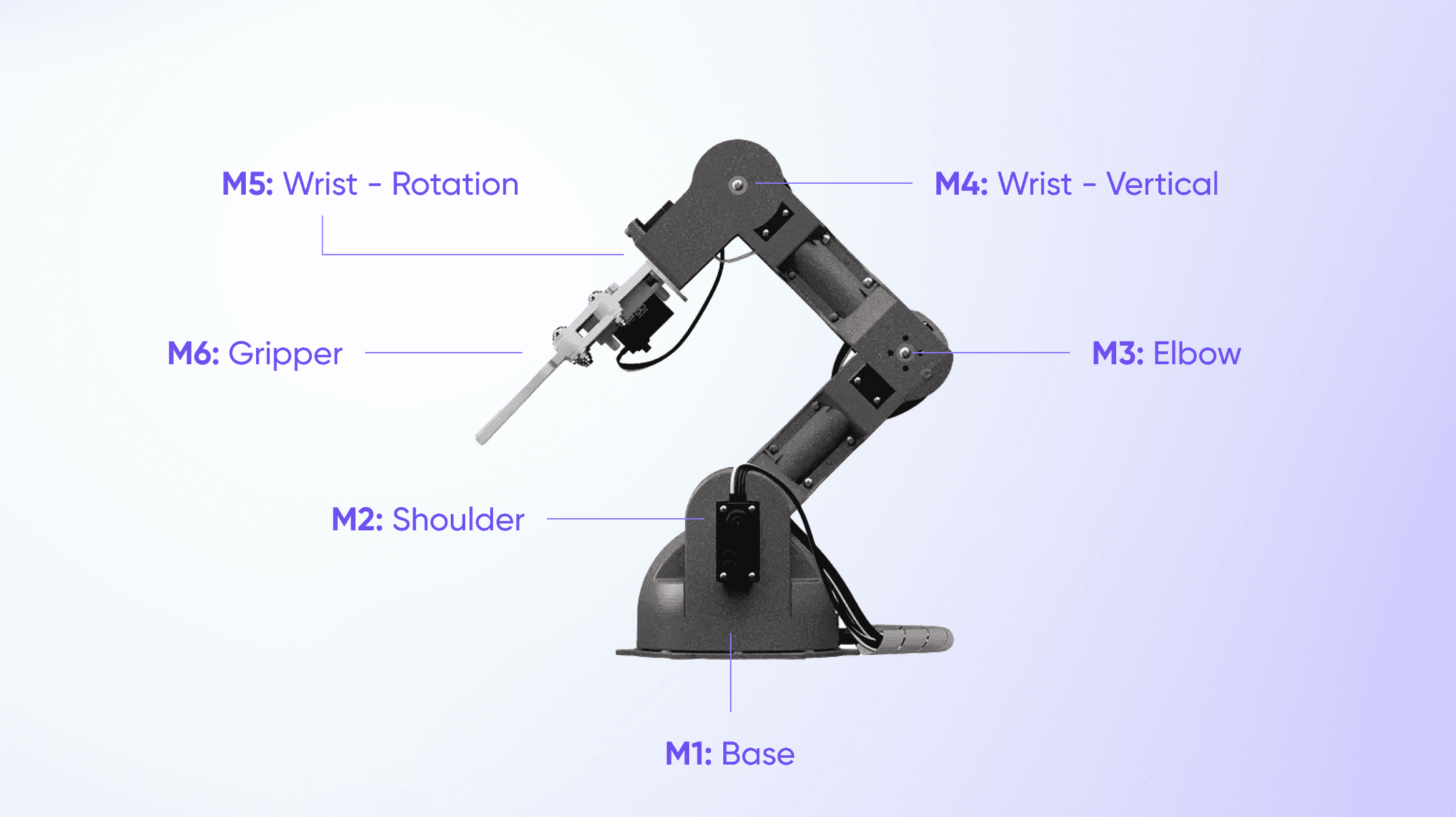
ロボットアームには 6 つのサーボモーターがあります。ProtoPie Connect 経由でメッセージを送信することで、各サーボモーターを制御できます。
ロボットアームの信号については、下の表を参照してください。
ロボットアームの信号。
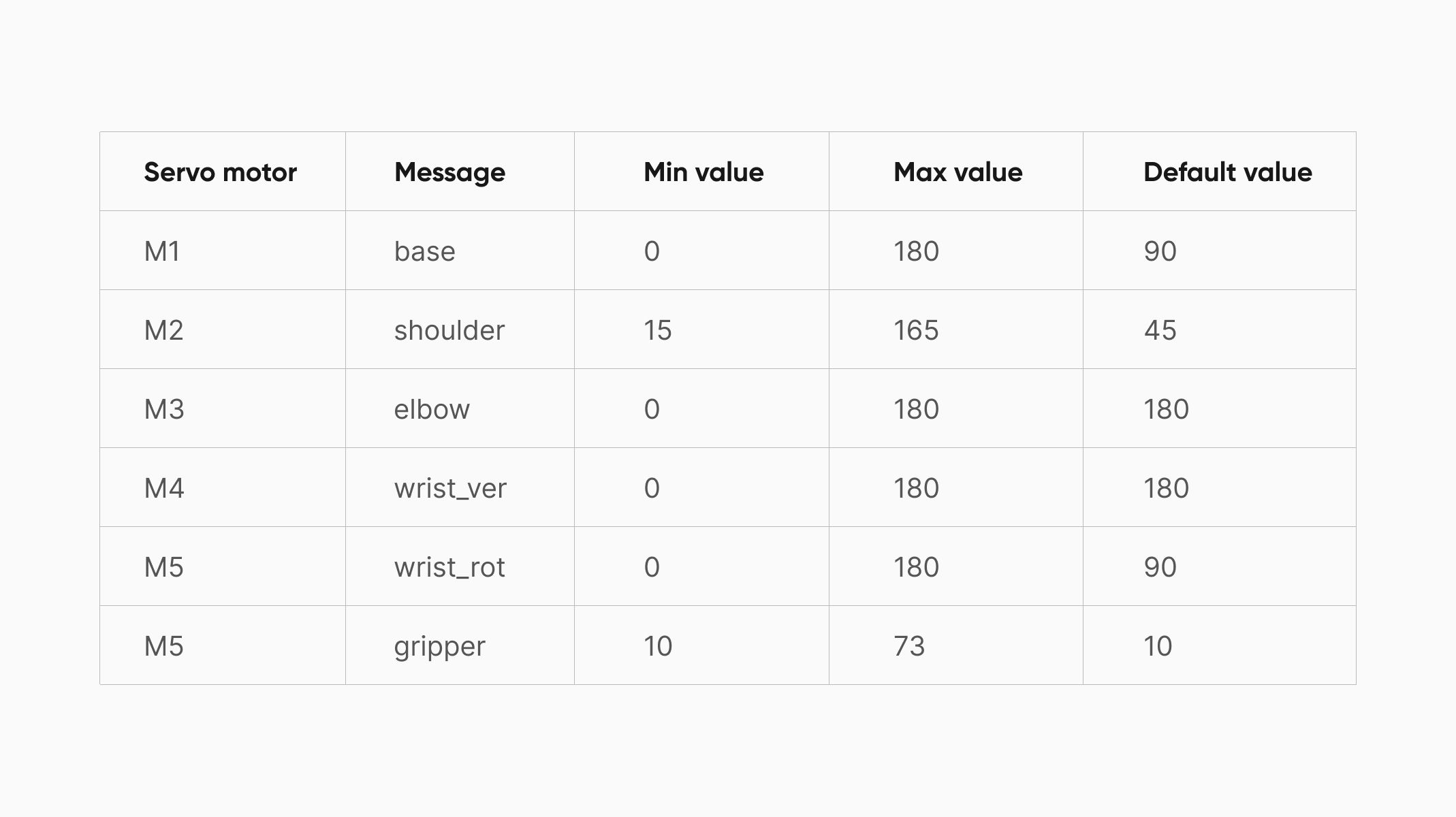
ロボットアームの信号。
次に、Arduino ボードを USB ケーブルでノートパソコンに接続し、ProtoPie Connect を起動します。Plugin → Arduino → Port → をクリックし、USB ポートを選択します。
次に、Arduino プラグインの「Run」ボタンを押して有効にします。
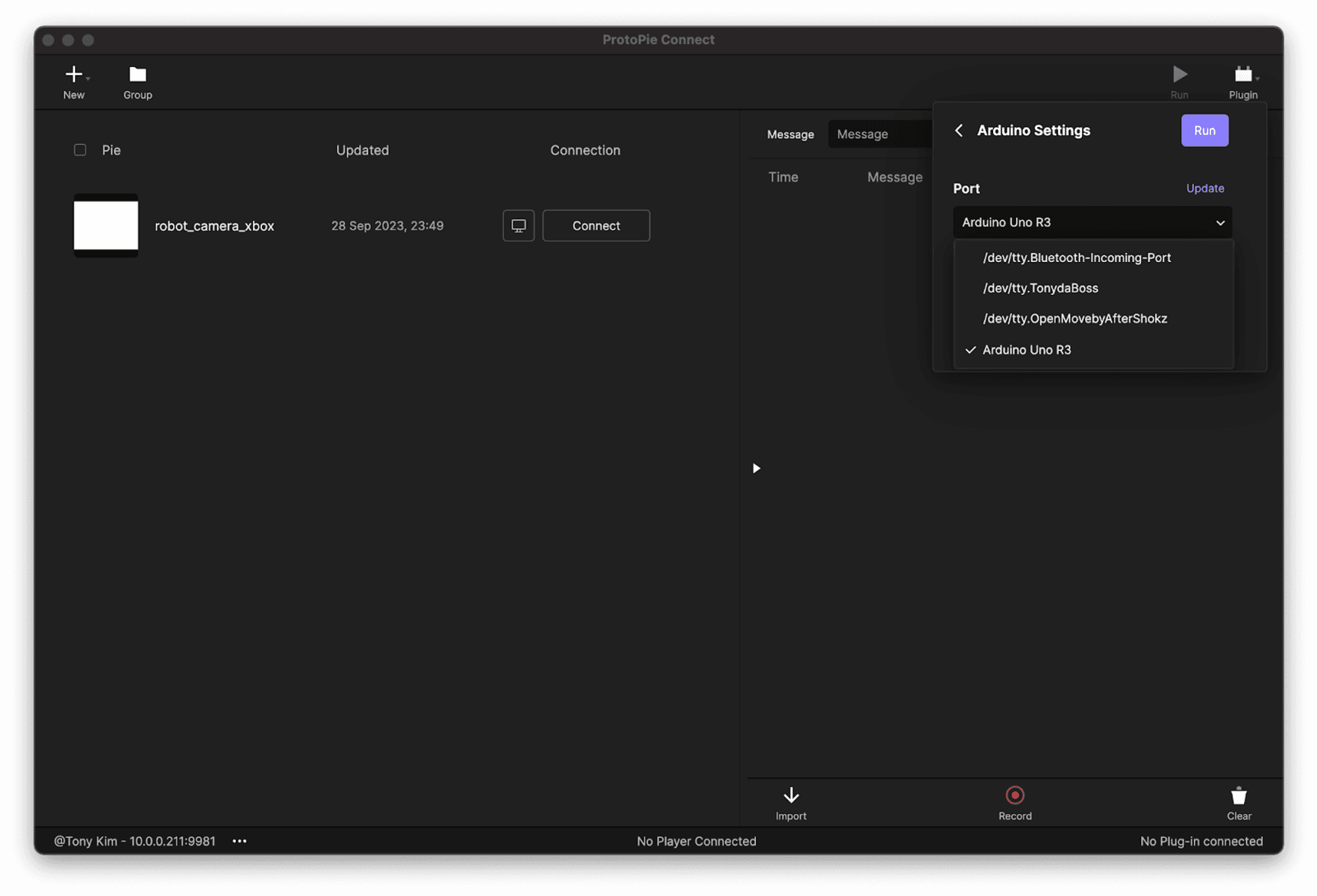
Arduino の接続。
メッセージを送信して正しく動作するかテストします。たとえば、base, value: 45. というメッセージで試せます。
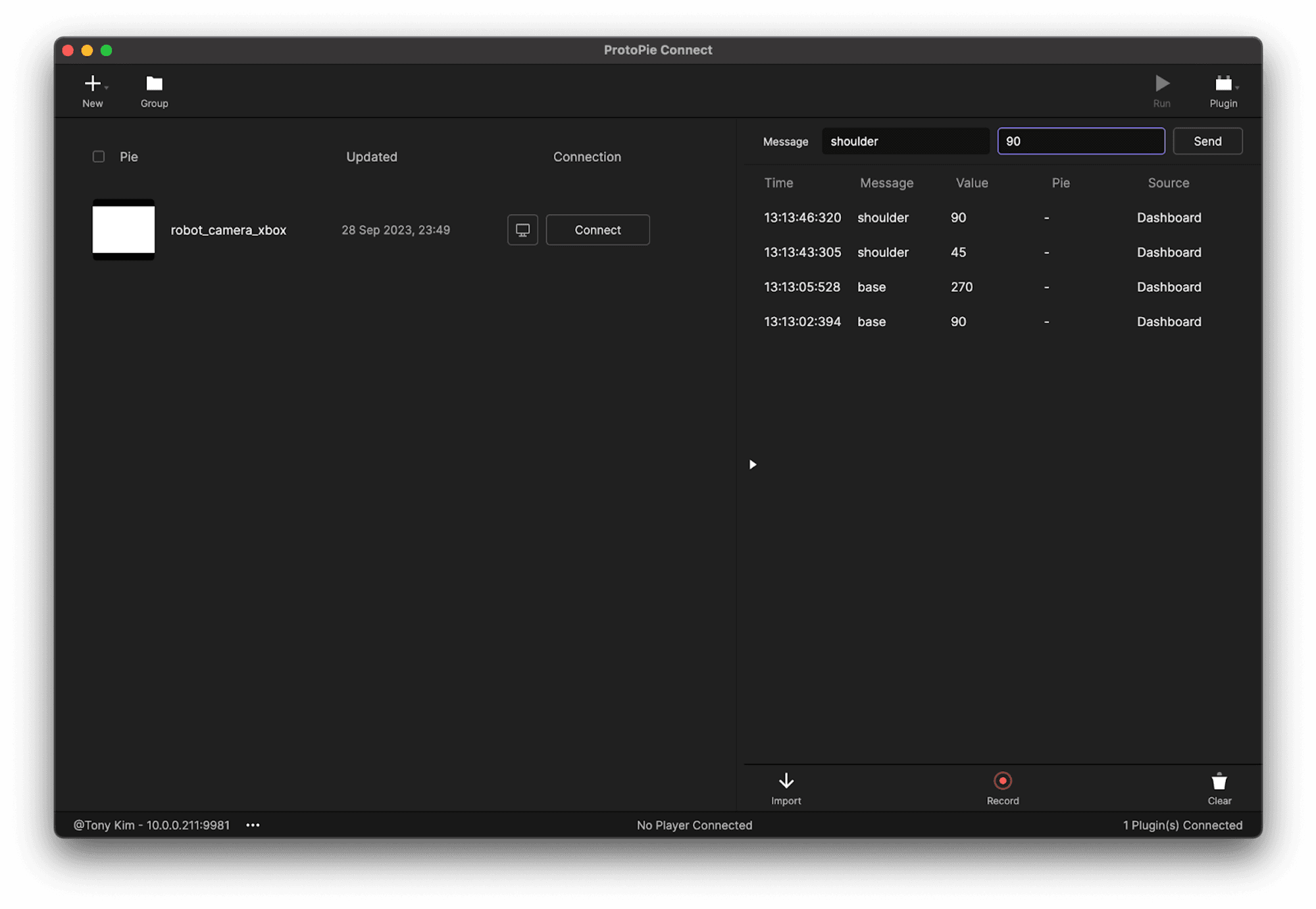
テストメッセージ。
テストメッセージ。
また、「reset」と入力すると元の位置にリセットできます。
3. ワイヤレスコントローラーを接続する
ここで、ワイヤレスコントローラーを Bluetooth 経由でノートパソコンに接続します。
ゲームパッドから信号を受信するには、ゲームパッドプラグインを実行する必要があります。ゲームパッドプラグイン の詳細をご覧ください。
ワイヤレスコントローラーが接続され、ゲームパッドプラグインが実行されると、ProtoPie Connect は信号を受信できます。下の表はゲームコントローラーからの信号を示しています。

コンソール。
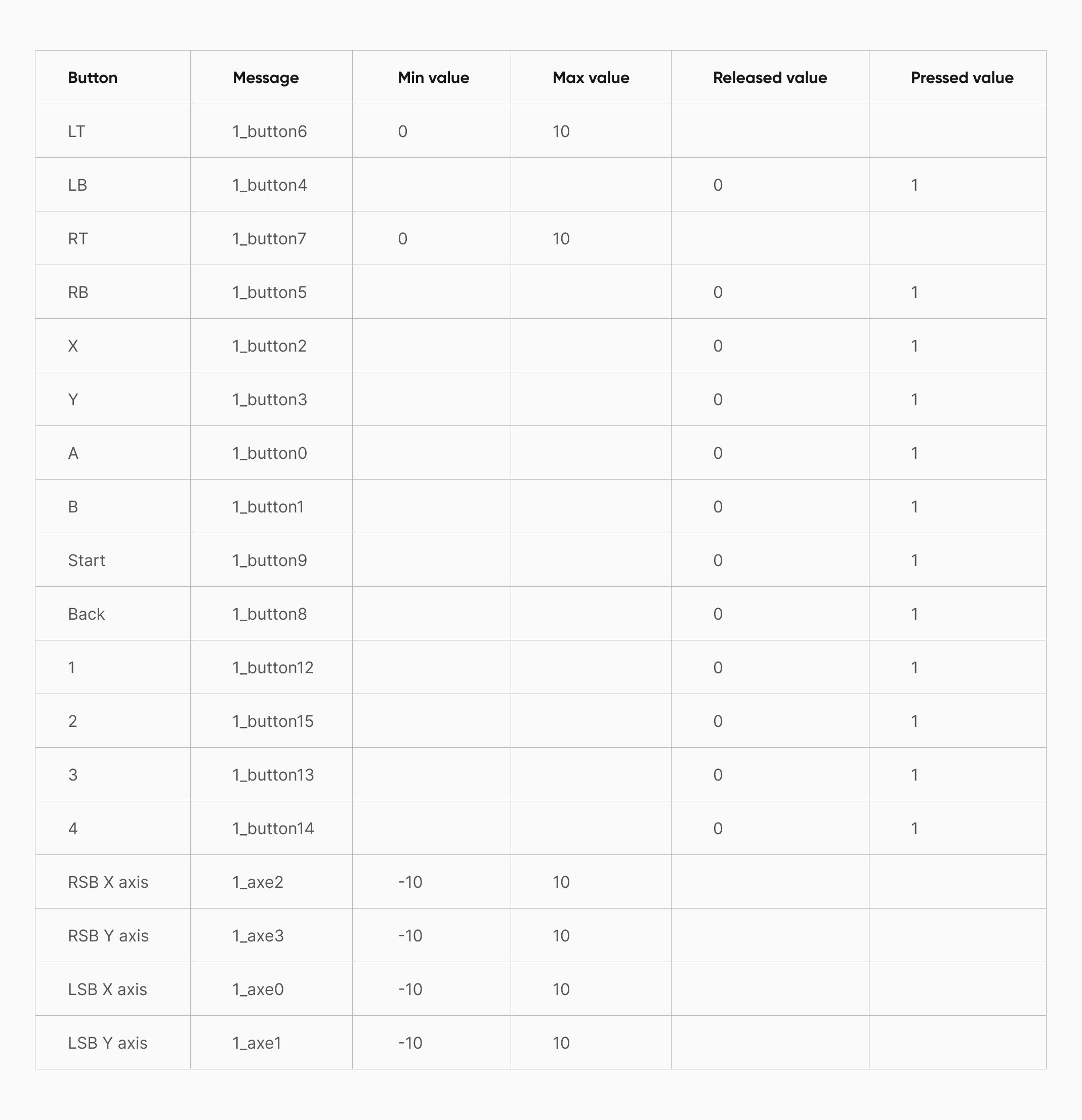
コントローラーの信号。
4. ワイヤレスコントローラーを Arduino にブリッジする
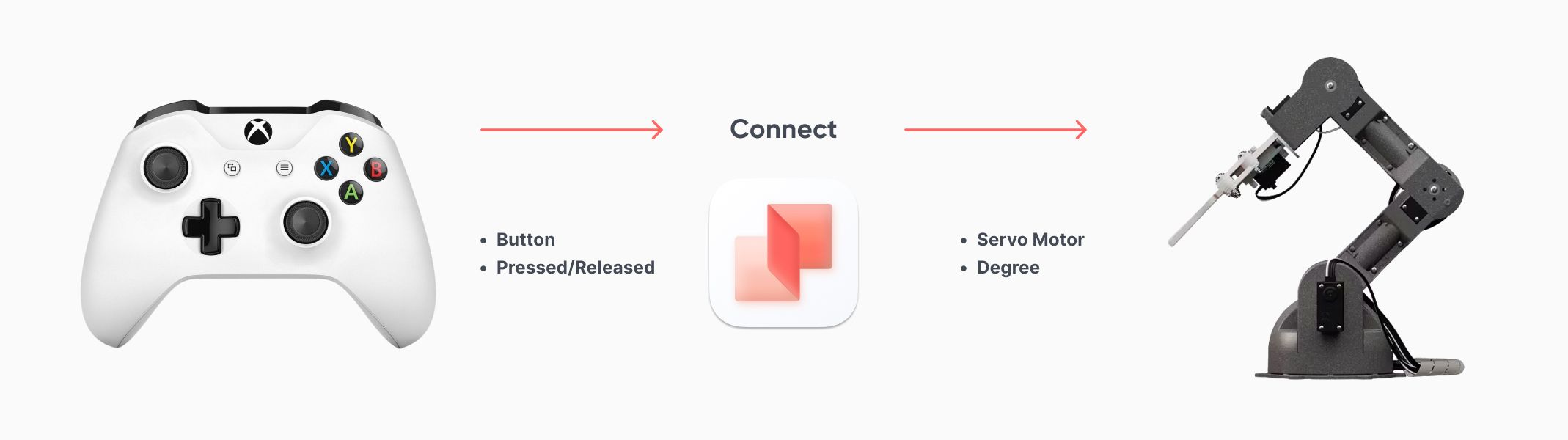
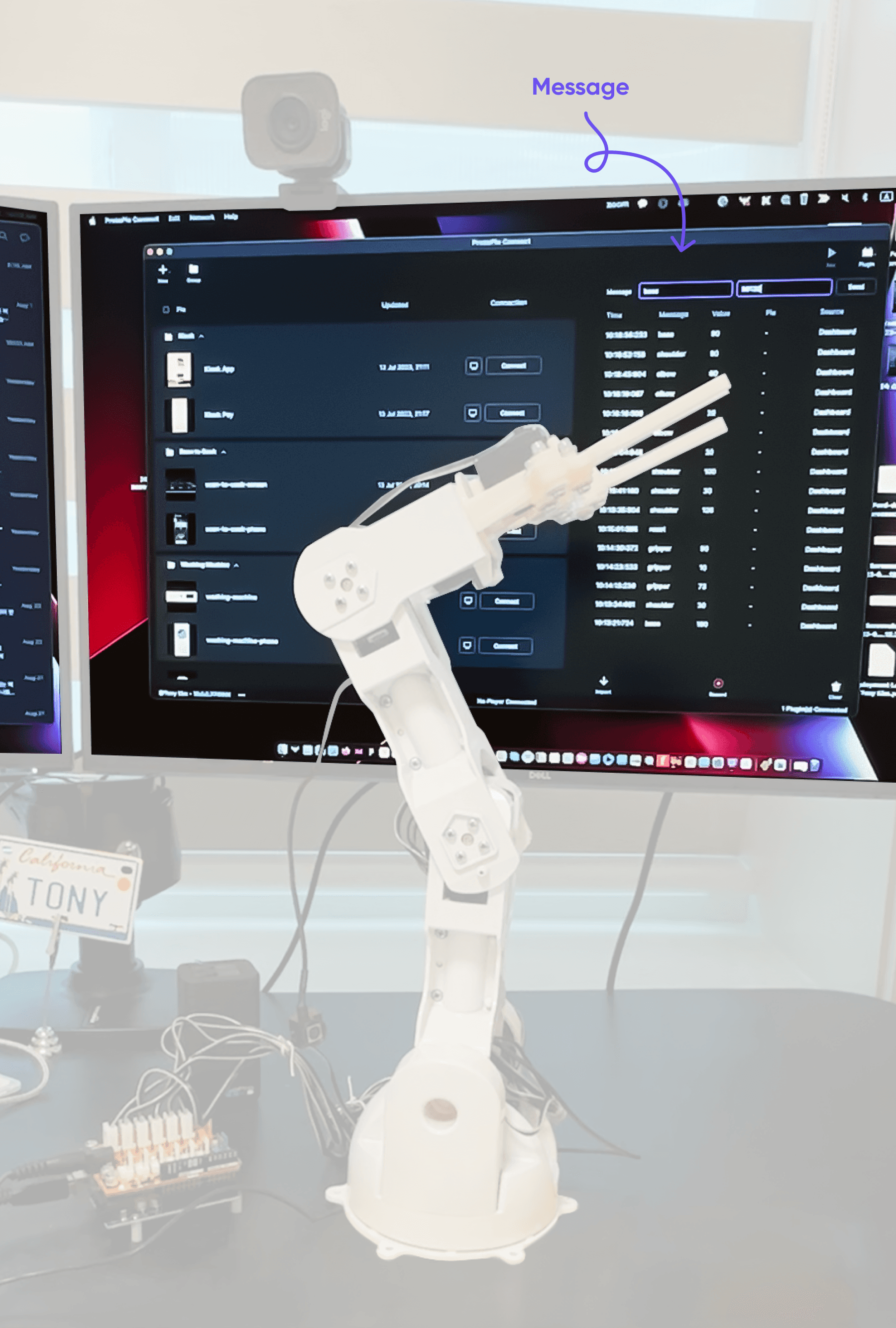
ProtoPie Connect がロボットアームとコントローラーを接続しています。

コントローラー。
ゲームコントローラーを接続したことで、ProtoPie Connect はゲームコントローラーからの信号を受信し、それを Arduino に送信します。
ProtoPie を使って、ロボットアームの制御と、ゲームコントローラーと Arduino の間でやり取りされる信号の解読の両方を行うデジタル UI をプロトタイピングしました。以下に用意した Pie ファイルをアクセスしてダウンロードし、詳しくご覧ください。
UI。
ロボットアームのベース部分(M1 サーボモーター)を制御するには、右のサムスティック(RSB)を左右に動かすだけです。するとゲームパッドが、スティックの動きに基づいて値(-10 から 10 の範囲)を持つメッセージ(1_axe2)を送信します。
ProtoPie Connect はこのメッセージを受信し、UI プロトタイプ(Pie)がその値が正か負かを判断します。正の値はベースが時計回りに回転することを意味し、負の値は反時計回りを意味します。次に、Pie は値(現在の角度に ±5 を加えたもの)を持つメッセージ(base)を送信します。
Arduino で制御されるロボットアームはこのメッセージを受信し、内容を理解して、それに応じて動き始めます。つまり、ゲームコントローラーの右サムスティックを動かすことで、ロボットアームのベース回転を制御できます。
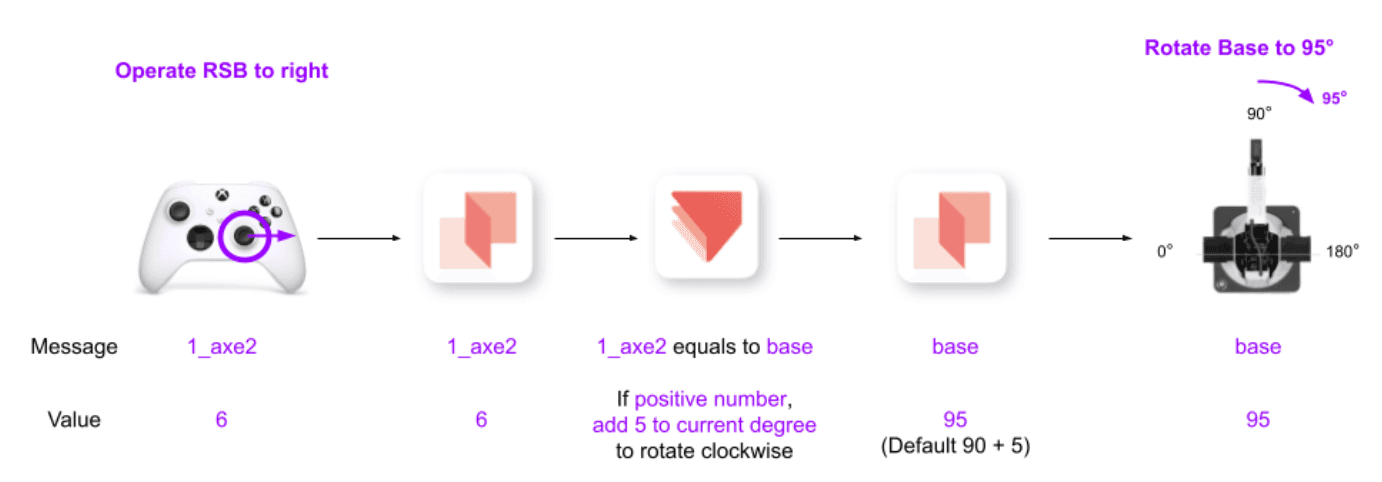
Pie は、ロボットアームが理解できるように、コントローラーからのメッセージと値を解釈しています。
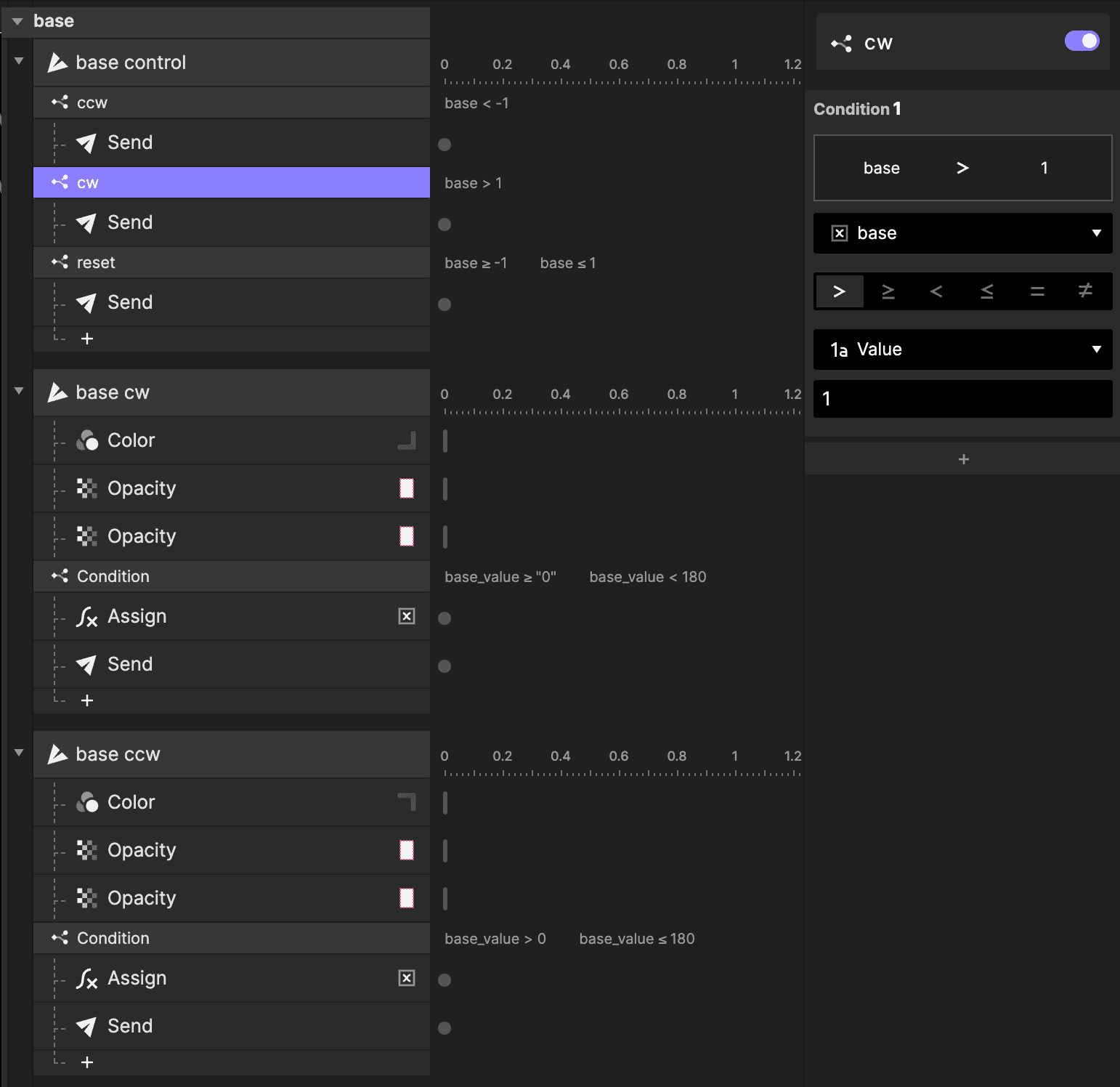
条件は、値が 1 より大きいかどうかを確認します。
5. UI にカメラ映像を統合する
最後の仕上げは、ライブのカメラ映像を UI に統合することです。これを実現するには、カメラ映像の上に Pie ファイルを重ねるための node サーバーが必要です。ProtoPie Connect 2.7.0 のリリースにより、ロボティクスシステムにライブカメラ映像を統合できるというエキサイティングな新機能が追加され、知覚機能と対話機能が大幅に向上しました。
ソースファイル をダウンロードし、以下の動画チュートリアルに従って、デジタル UI にカメラ映像を作成してください。
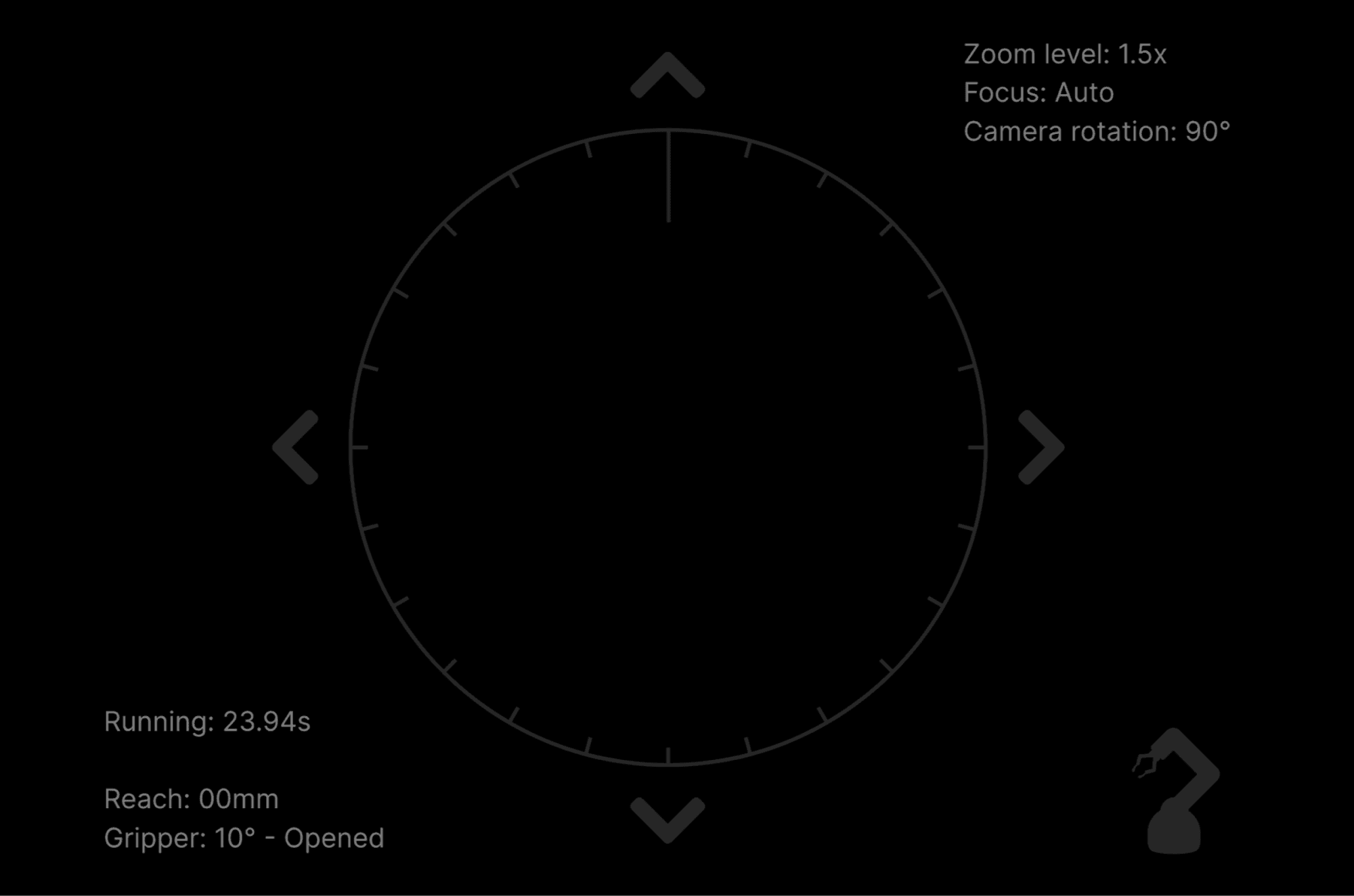
カメラ映像を統合すると、UI は下の画像のようになります。
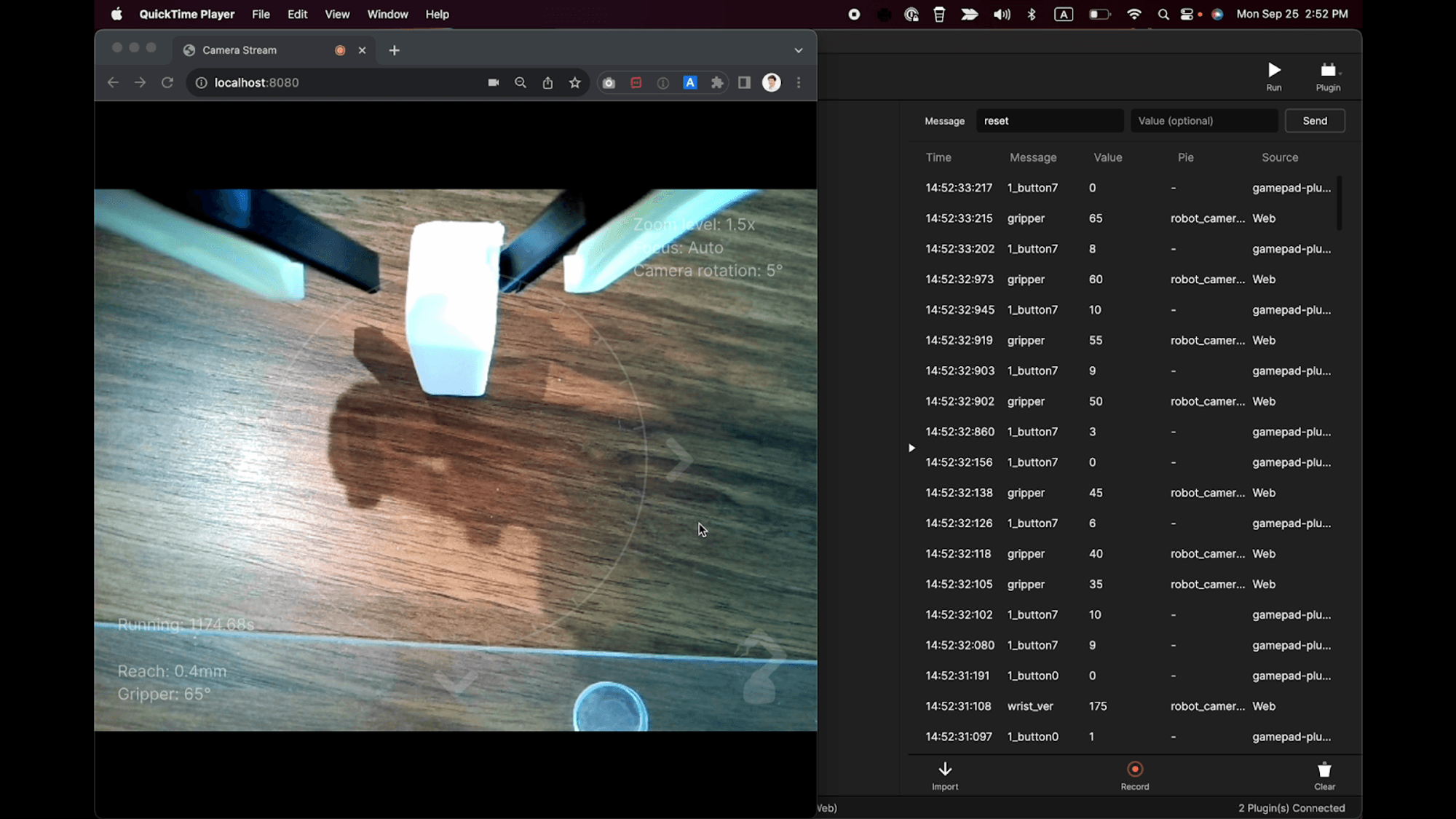
ライブカメラ映像付きの UI。
それで完了です!外科用ロボットアームのプロトタイプが完成しました
これで準備完了です!完全に機能するロボットアームのプロトタイプを作成できました。皆さんがどのようなロボティクスのプロトタイプを作るのか、私たちはとても楽しみにしています。SNS で #MadeWithProtoPie を付けてぜひ教えてください!
ロボティクスと MedTech の未来を形作る
進化の速い今日の MedTech とロボティクスの世界では、一歩先を行くために革新的なツールが欠かせません。ProtoPie は先進的なプロトタイピングの最前線に立ち、ロボティクスの未来や、Manufacturing、Healthcare、Transportation、Logistics など、現在進行形で変革を起こしている多くの業界を再構築する比類のない可能性を提供します。
ProtoPie をダウンロードして今すぐ始めるか、詳しくは ProtoPie の専門スタッフにご相談ください。