高级原型制作是机器人领域创新的核心脉搏,为工程师、设计师和发明者提供了一个动态平台,将他们的想法转化为可触及的现实。
这些机器人广泛应用于医疗保健、制造、交通运输、物流等多个领域,因此原型制作是为现实世界挑战创建解决方案的关键步骤。机器人原型制作不仅推动产品改进,还在评估和管理潜在风险方面发挥着重要作用。
在本文中,我们将探索 ProtoPie 在机器人原型制作中的实际应用。为展示其能力,我们将创建一个医疗科技行业中常见的外科机器人手臂原型。我会带你完成使用无线控制器操控 Arduino 机械臂的全过程,而这一切都将通过 ProtoPie 实现!
概览
准备机械臂
如何让机械臂移动
连接无线控制器
将无线控制器桥接到 Arduino
将摄像头画面集成到 UI
就这样!外科机器人手臂原型完成了!
塑造机器人与医疗科技的未来
💡注意:在我们专属的 Robotics & MedTech 网络研讨会中,我们展示了这个机械臂的现场演示。如果你未能参加,请务必观看回放,了解 ProtoPie 如何简化设计流程,并获得行业高效原型制作最佳实践的洞见。
1. 准备机械臂
由于我们收到了众多机器人和医疗科技公司关于 ProtoPie 在机器人原型制作能力方面的咨询,我们决定演示如何为典型使用场景制作原型。
为了开始,我们购买了一个 Arduino Braccio 机械臂 和一个无线游戏手柄控制器,以创建外科机器人手臂原型。为了让机械臂看起来更像“医疗机器人手臂”,我们将其部件喷涂成白色。
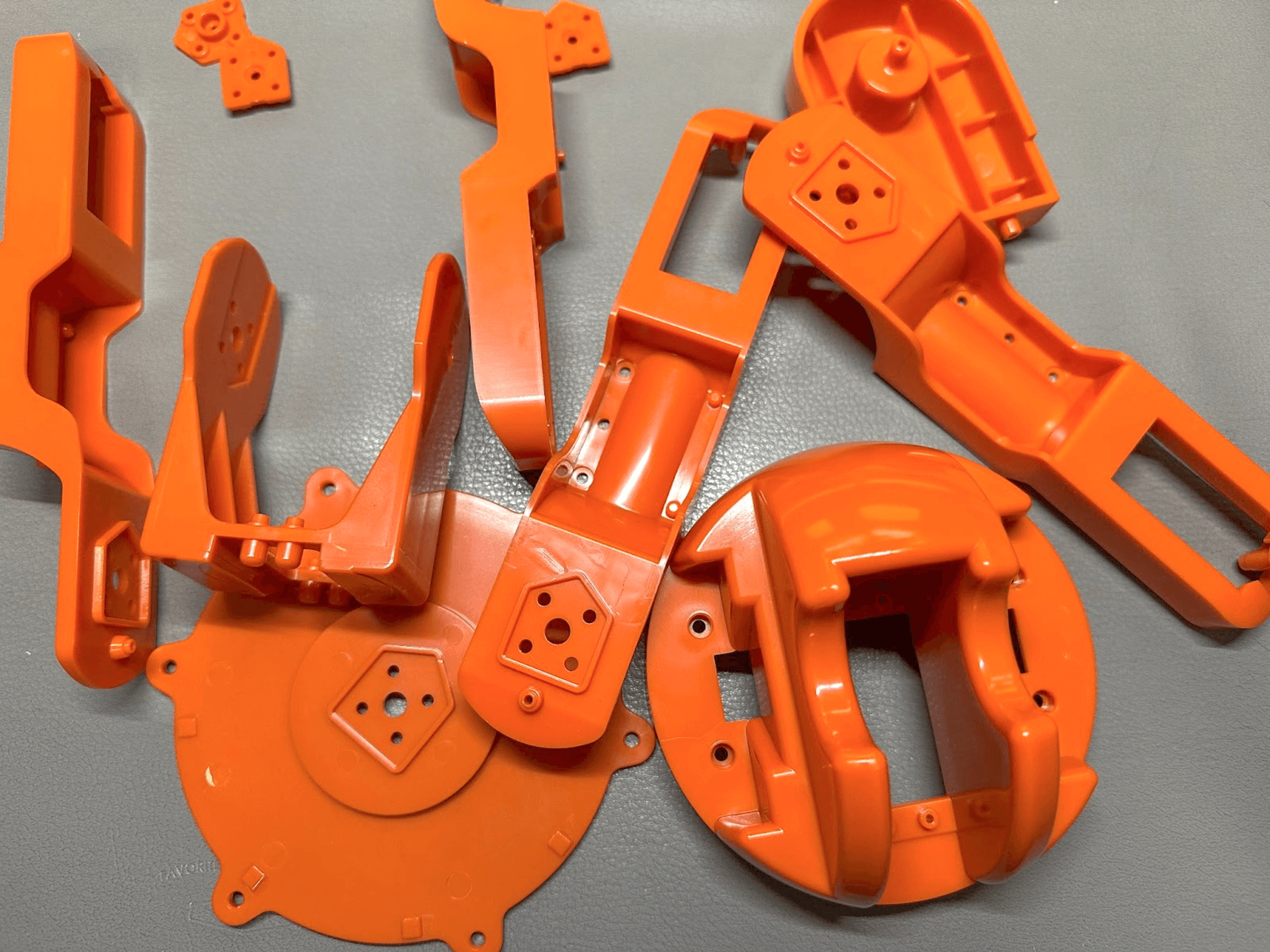
喷漆前的机械臂。
首先,我们以灰色作为底色。
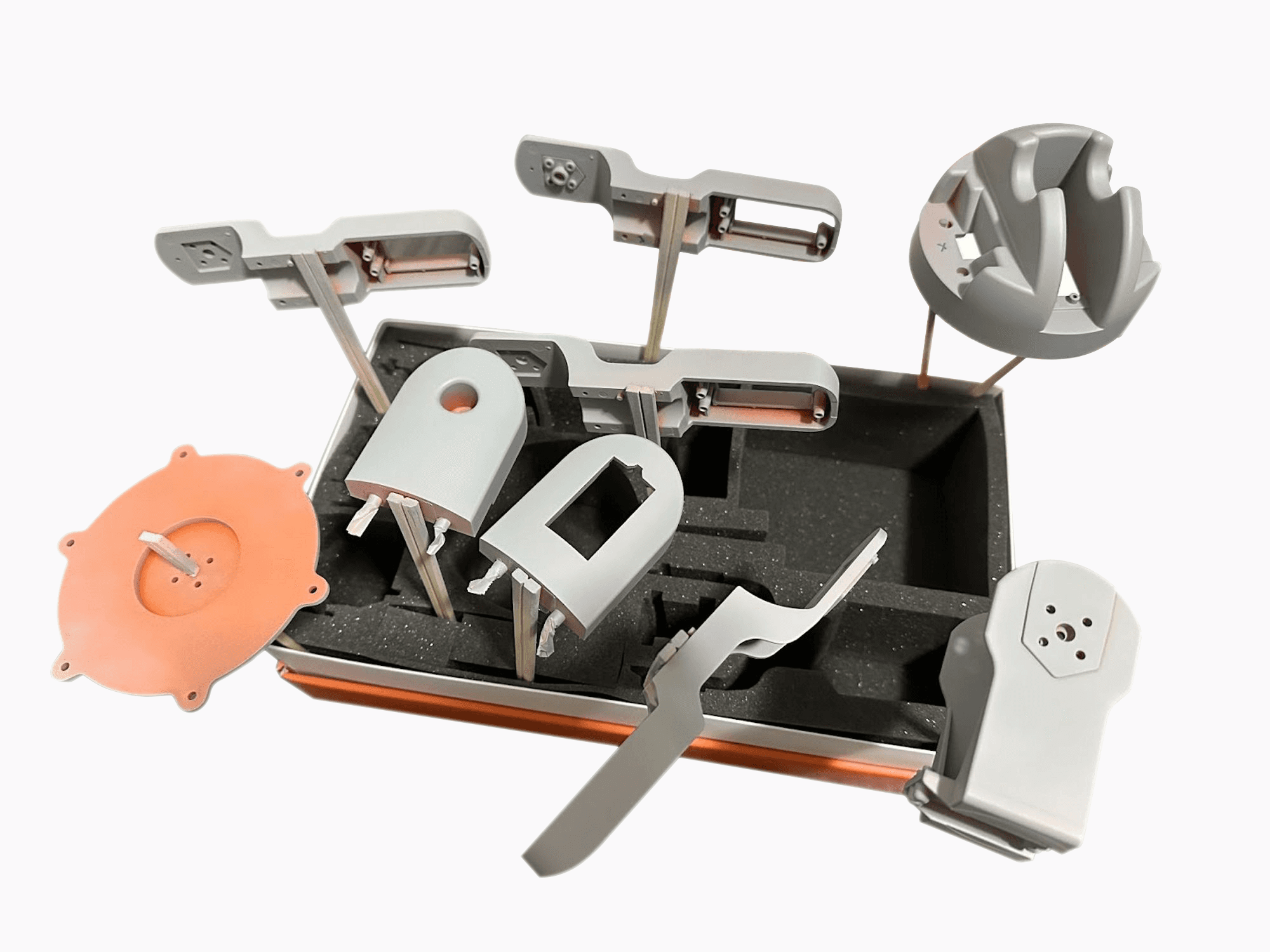
为机械臂喷涂灰色底漆。
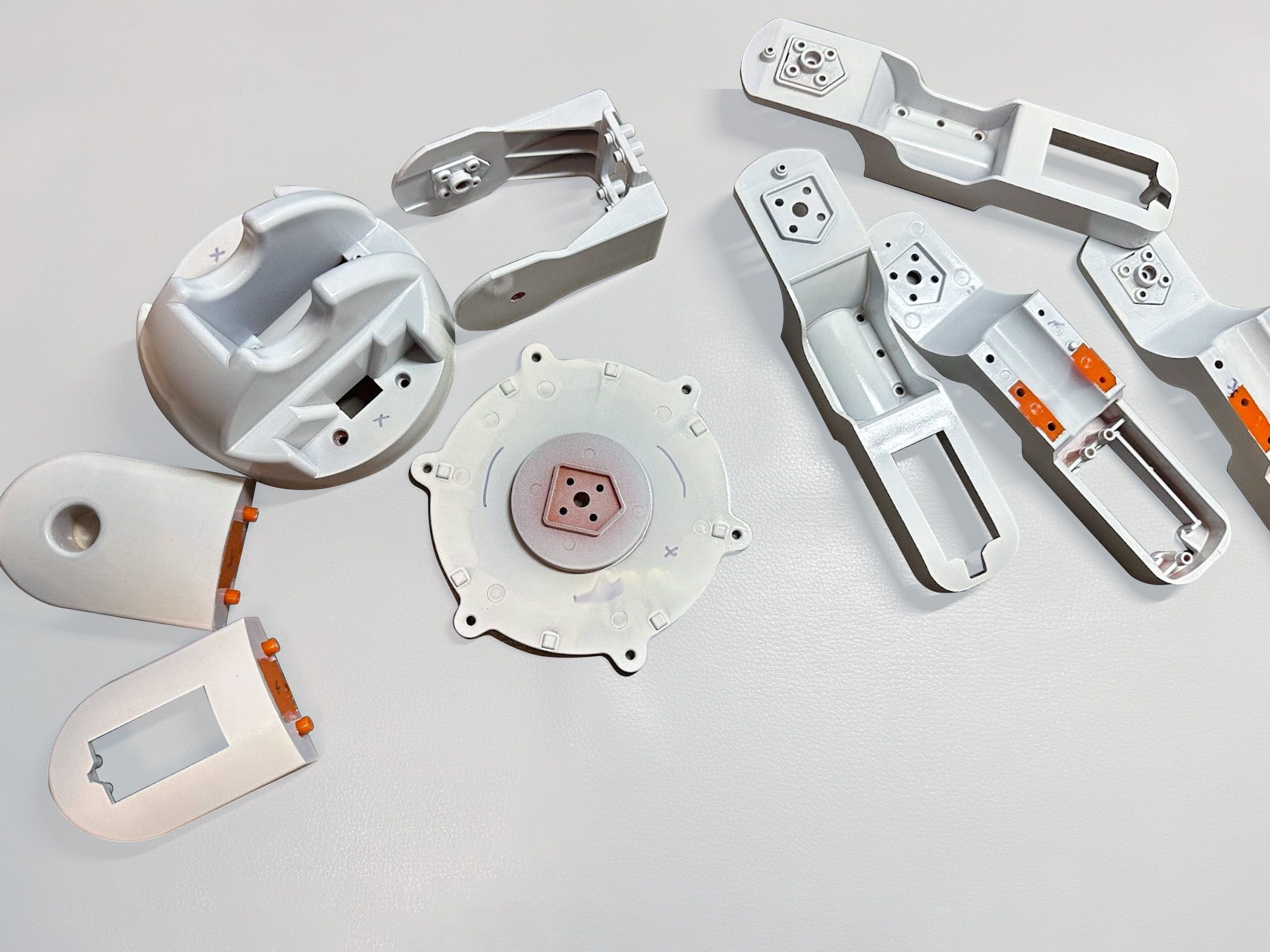
机械臂部件。
最后,我们将整个机械臂喷涂成白色。按照随附说明即可轻松组装机械臂部件。
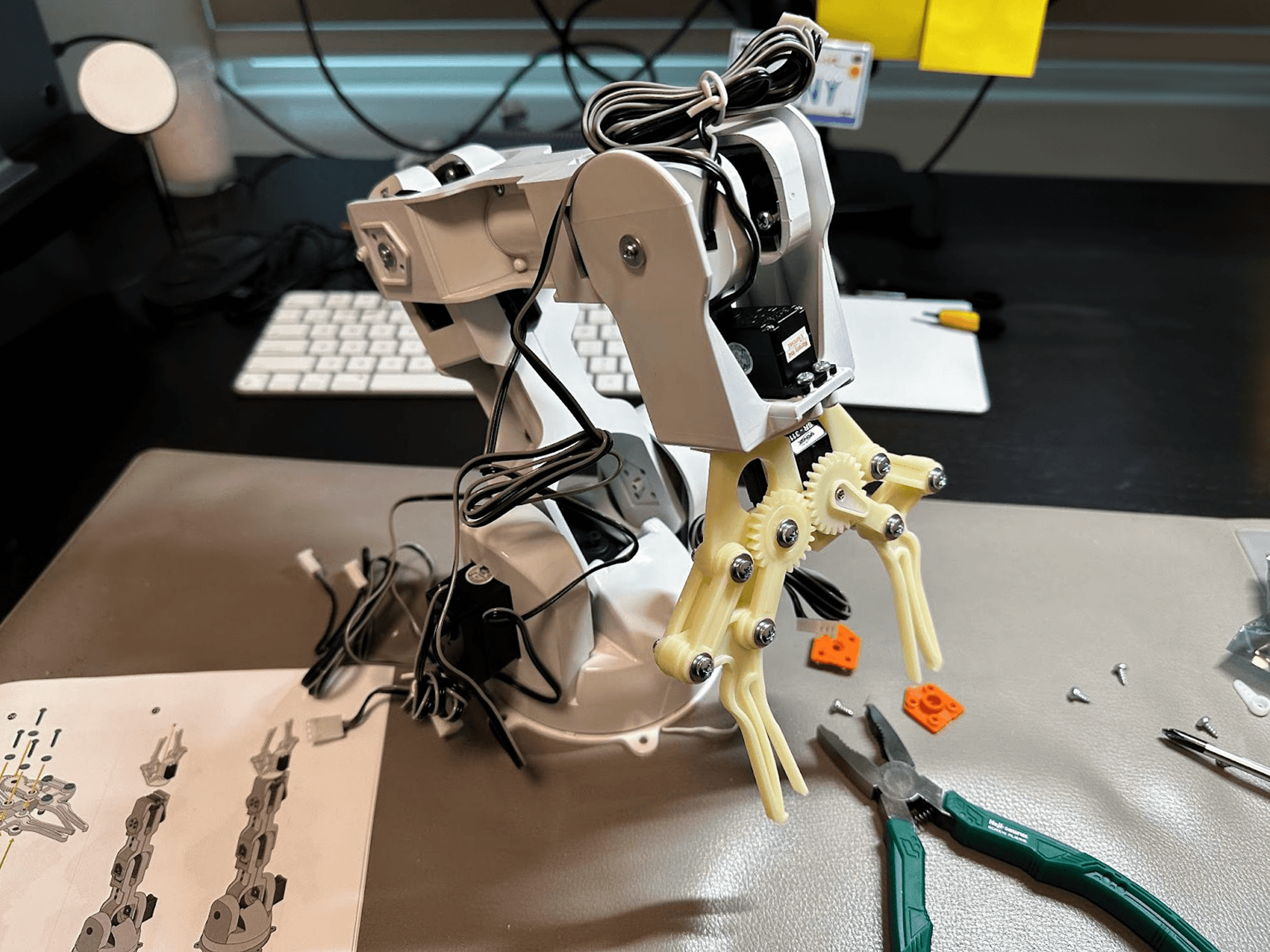
白色机械臂原型。
由于外科机器人配有摄像头来监控患者及其周围环境,我们在夹爪末端安装了一个 USB 摄像头模块。这类 USB 摄像头 可以很容易在网上购买。
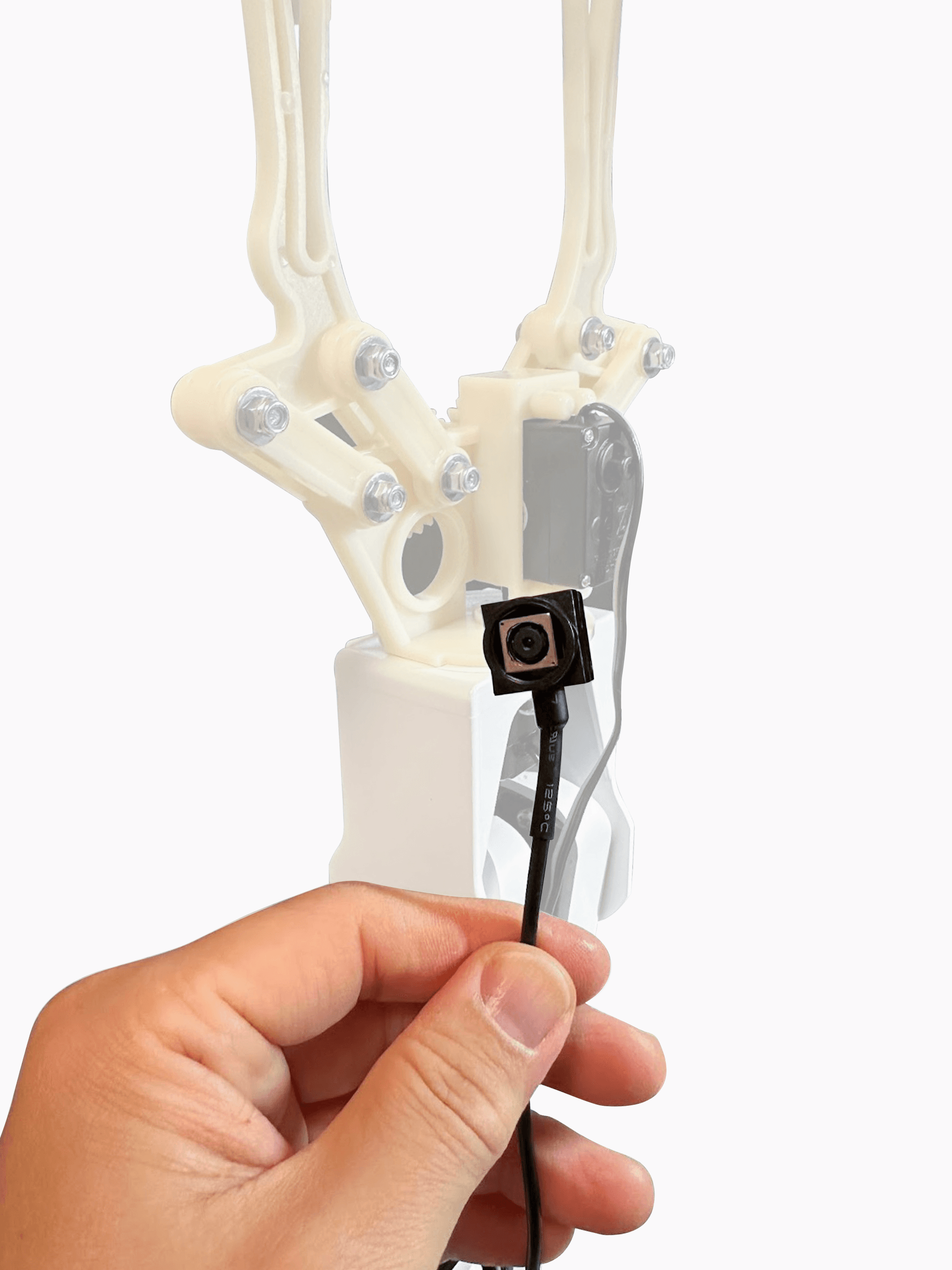
USB 摄像头。
我们使用的机械臂套件不包含 Arduino 开发板,因此我们需要自行准备。我们使用了 Arduino UNO R3,并与扩展板组装在一起。至此,这个医疗原型所需的硬件就准备好了。
2. 如何让机械臂移动
你可以使用 Arduino 示例代码 在 ProtoPie Connect 上接收消息的同时控制机械臂。只需复制示例代码并上传到你的 Arduino 开发板即可。
如果你想了解更多,请参考以下资源:
机械臂有 6 个舵机。你可以通过 ProtoPie Connect 发送消息来控制每个舵机。
机械臂信号请参考下表。
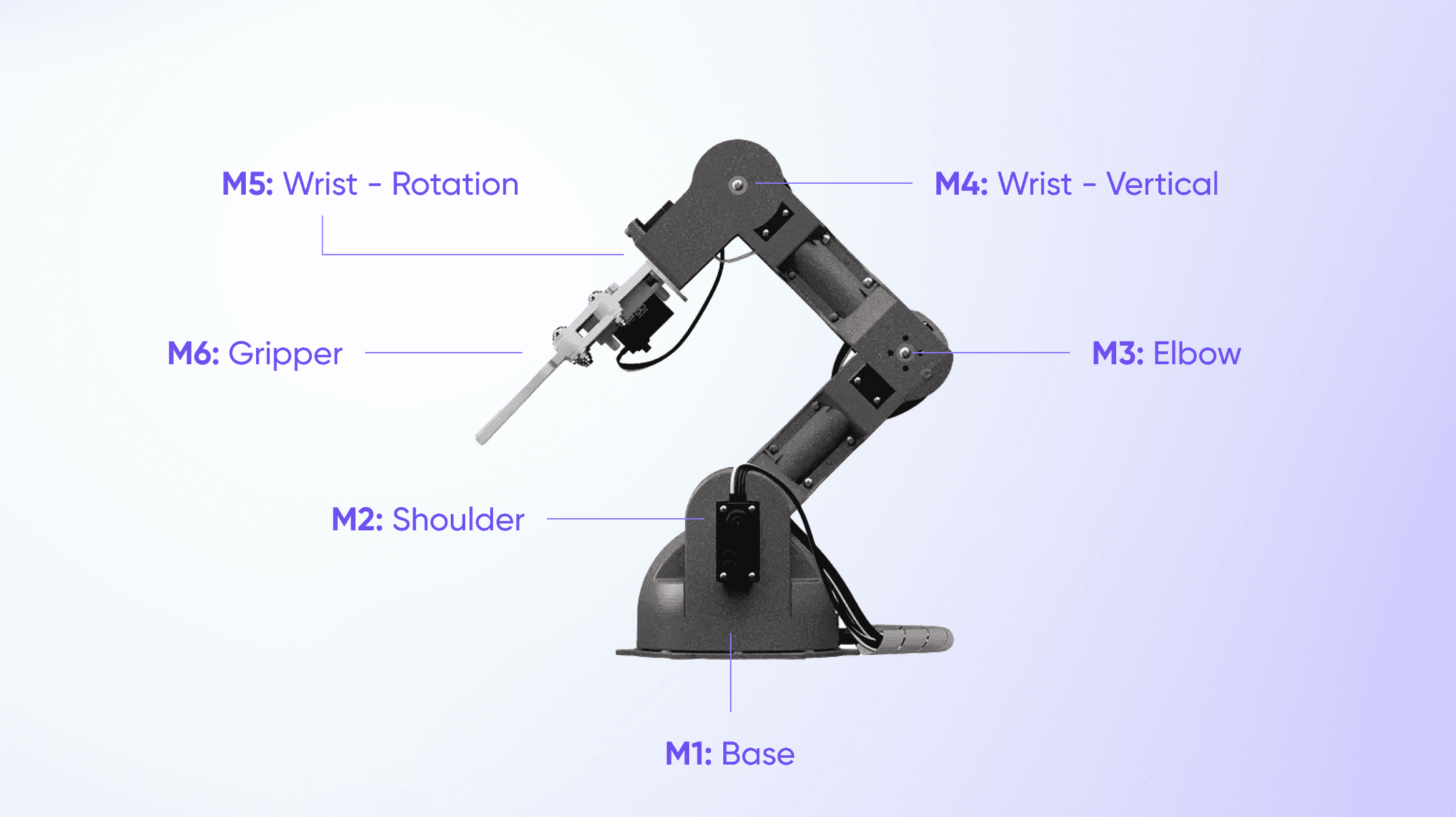
机械臂信号。
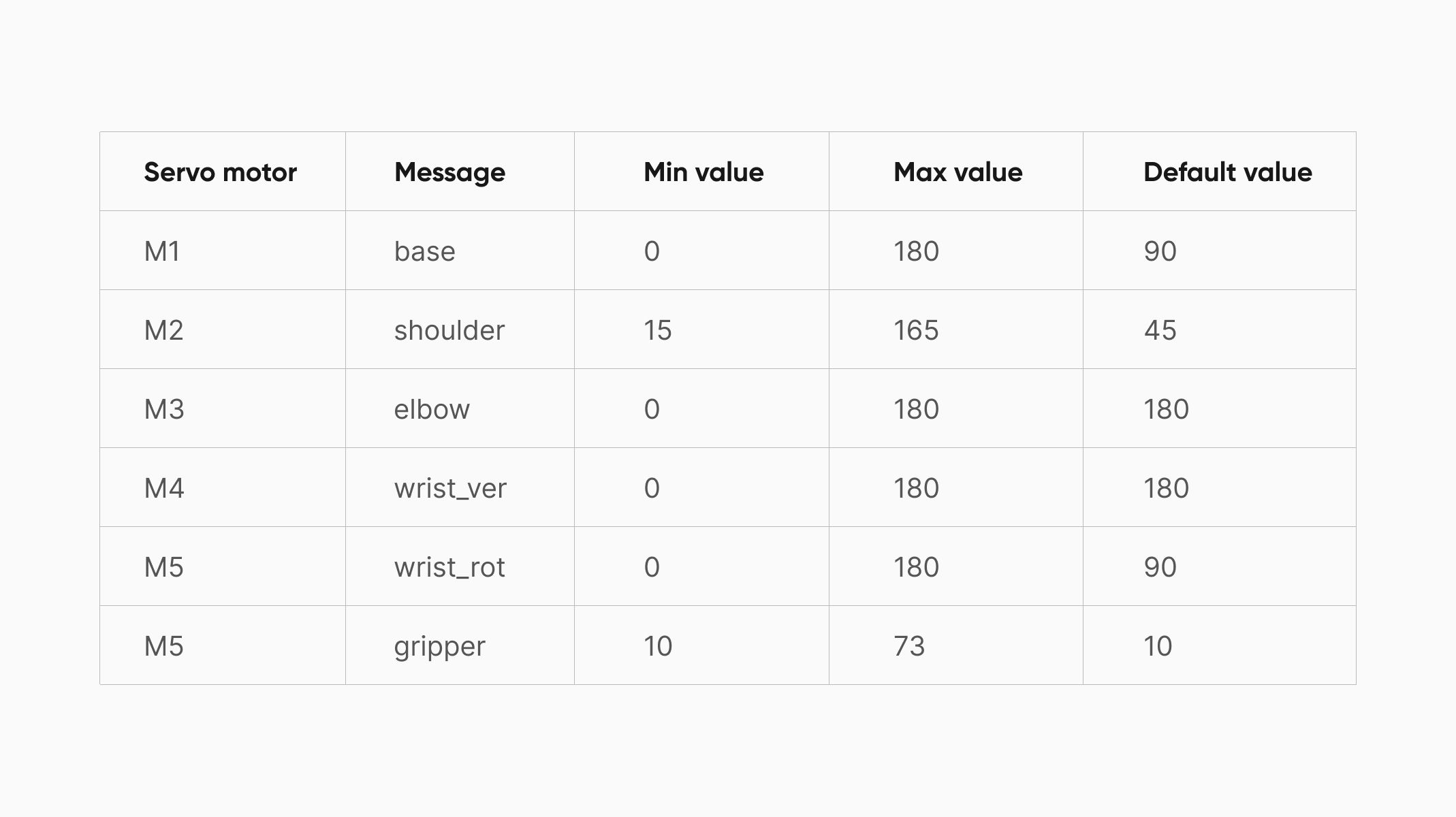
机械臂信号。
接下来,通过 USB 线将 Arduino 开发板连接到笔记本电脑并运行 ProtoPie Connect。点击 Plugin → Arduino → Port → 并选择 USB 端口。
然后,按下 Arduino 插件上的“Run”按钮以激活它。
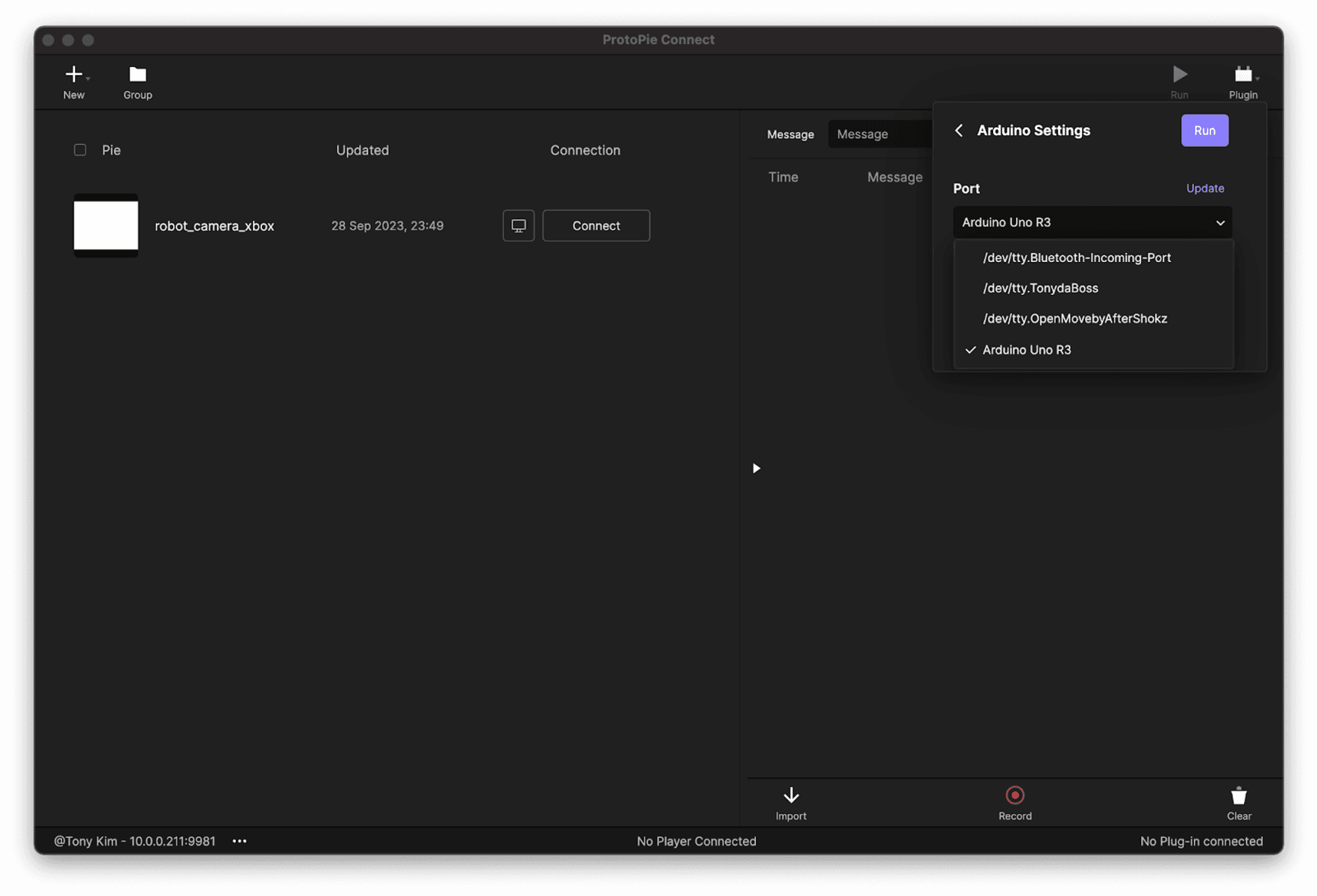
Arduino 连接。
通过发送消息测试其是否正常工作。例如,你可以用这条消息测试:base, value: 45。
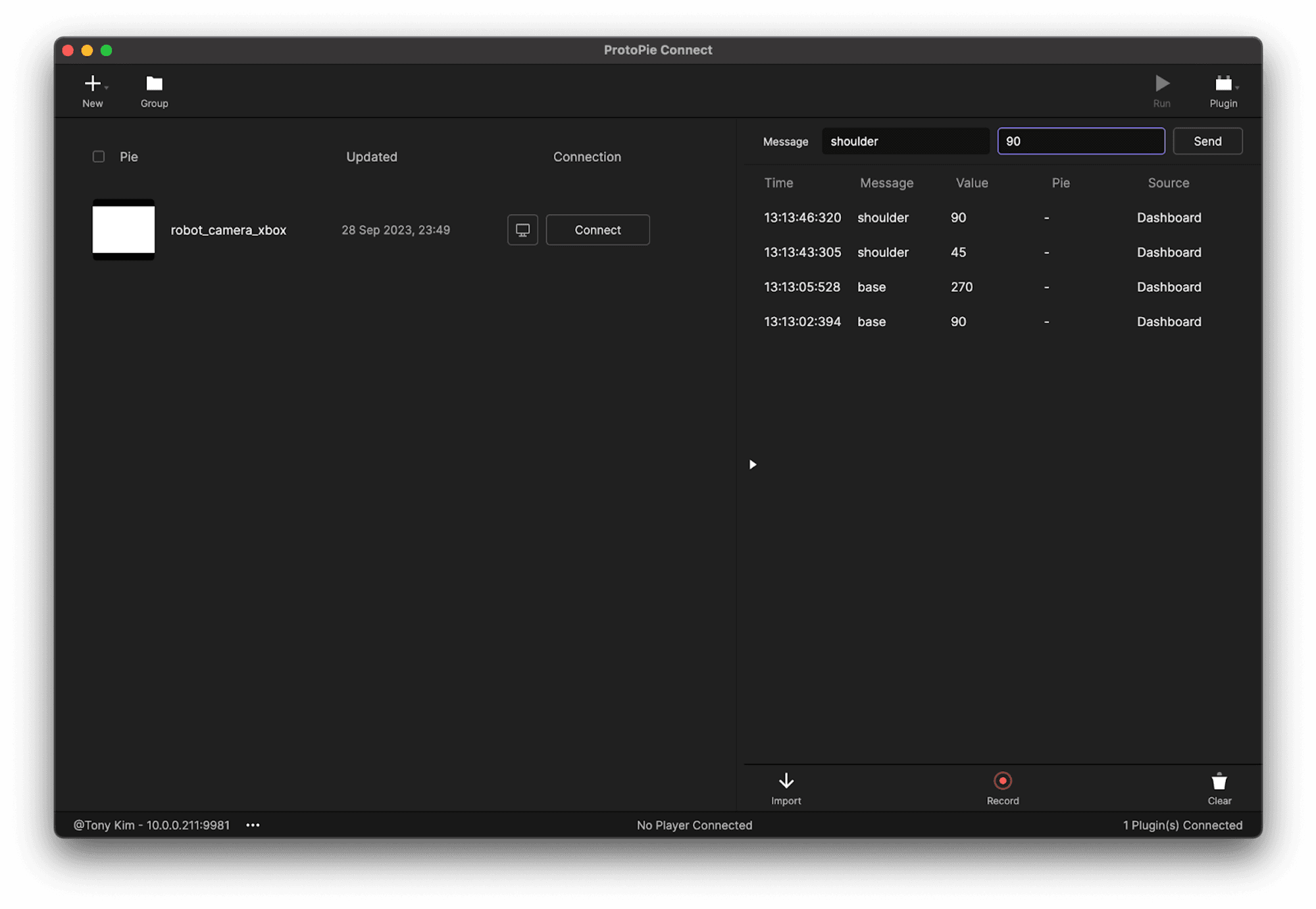
测试消息。
测试消息。
你也可以输入“reset”以重置到初始位置。
3. 连接无线控制器
现在是时候通过蓝牙将无线控制器连接到你的笔记本电脑了。
你需要运行 gamepad 插件来接收来自手柄的信号。了解更多关于 gamepad 插件 的信息。
无线控制器连接完成且 gamepad 插件运行后,ProtoPie Connect 就能接收信号。下表展示了游戏控制器发出的信号。

控制台。
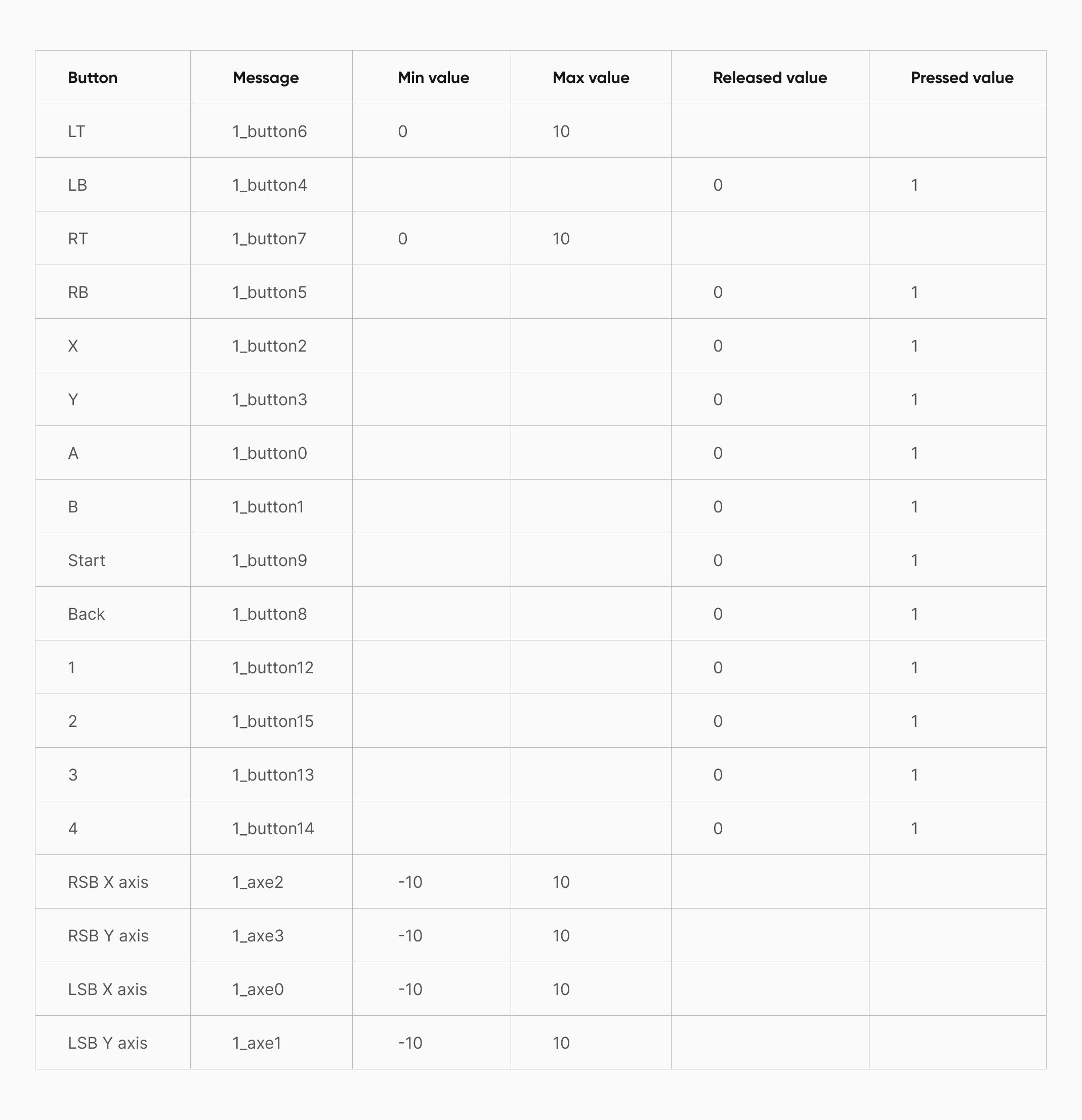
控制器信号。
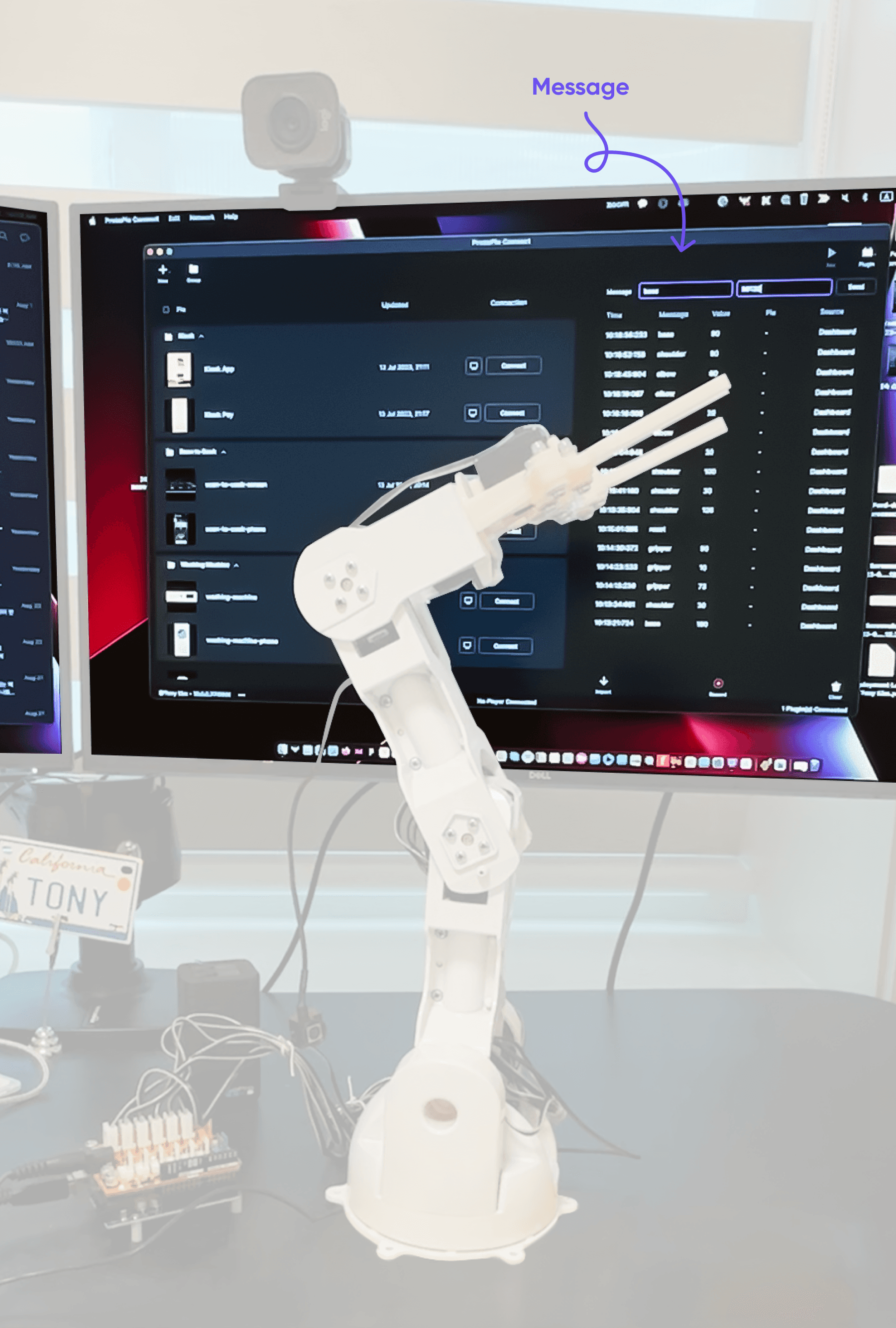
4. 将无线控制器桥接到 Arduino
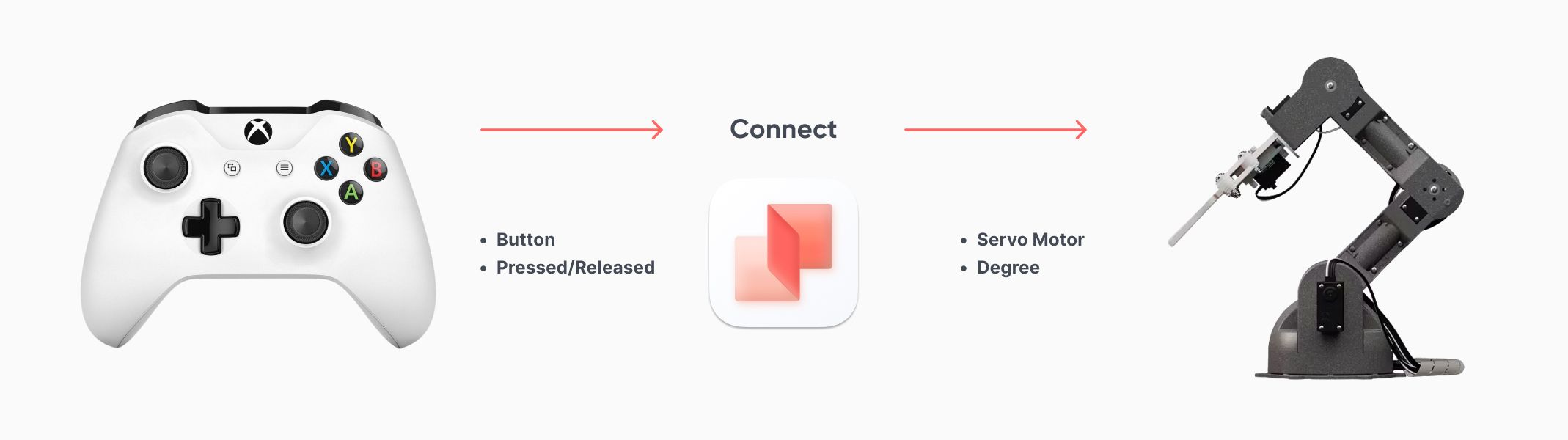
ProtoPie Connect 正在连接机械臂和控制器。

控制器。
现在我们已经连接了游戏控制器,ProtoPie Connect 会接收来自游戏控制器的信号并将其广播到 Arduino。
我们使用 ProtoPie 为控制机械臂以及解析游戏控制器与 Arduino 之间交换的信号制作了一个数字用户界面原型。你可以访问并下载下方提供的 Pie 文件进行更深入查看。
UI。
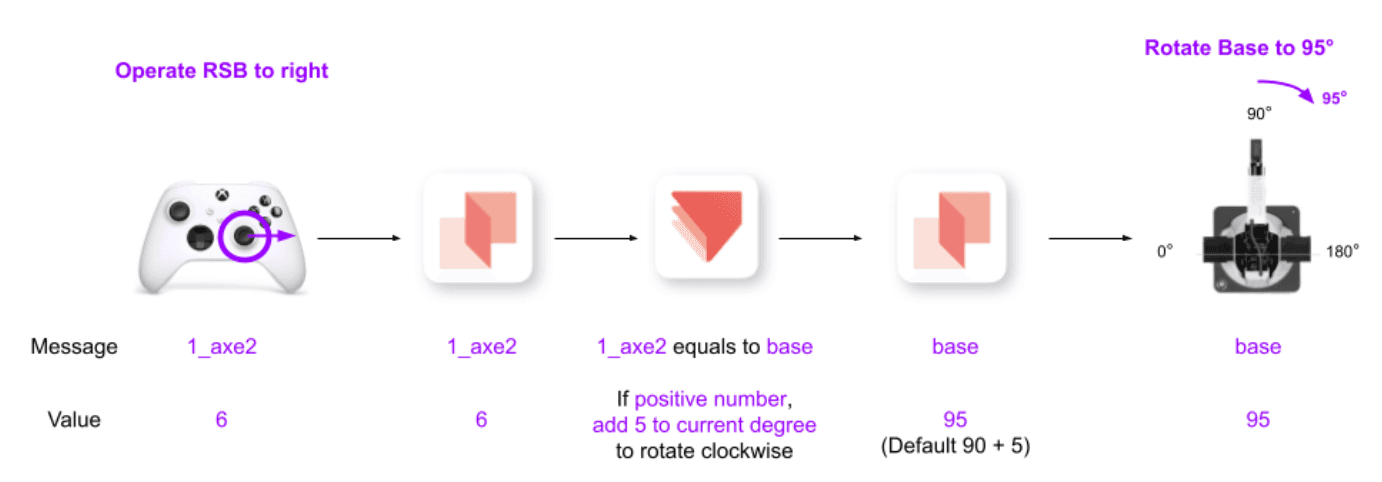
要控制机械臂的底座部分(M1 舵机),你只需将右摇杆(RSB)向左或向右拨动。随后,手柄会根据摇杆动作发送一条消息(1_axe2),其值在 -10 到 10 之间。
ProtoPie Connect 接收这条消息后,UI 原型(Pie)会判断它是正值还是负值。正值表示底座顺时针旋转,负值表示逆时针旋转。接着,Pie 会发送一条消息(base),其值为(当前角度加/减 5)。
由 Arduino 控制的机械臂接收并理解这条消息后,就会相应地开始运动。因此,通过移动游戏控制器的右摇杆,你就可以控制机械臂底座旋转。
Pie 解释来自控制器的消息和值,以便机械臂能够理解。
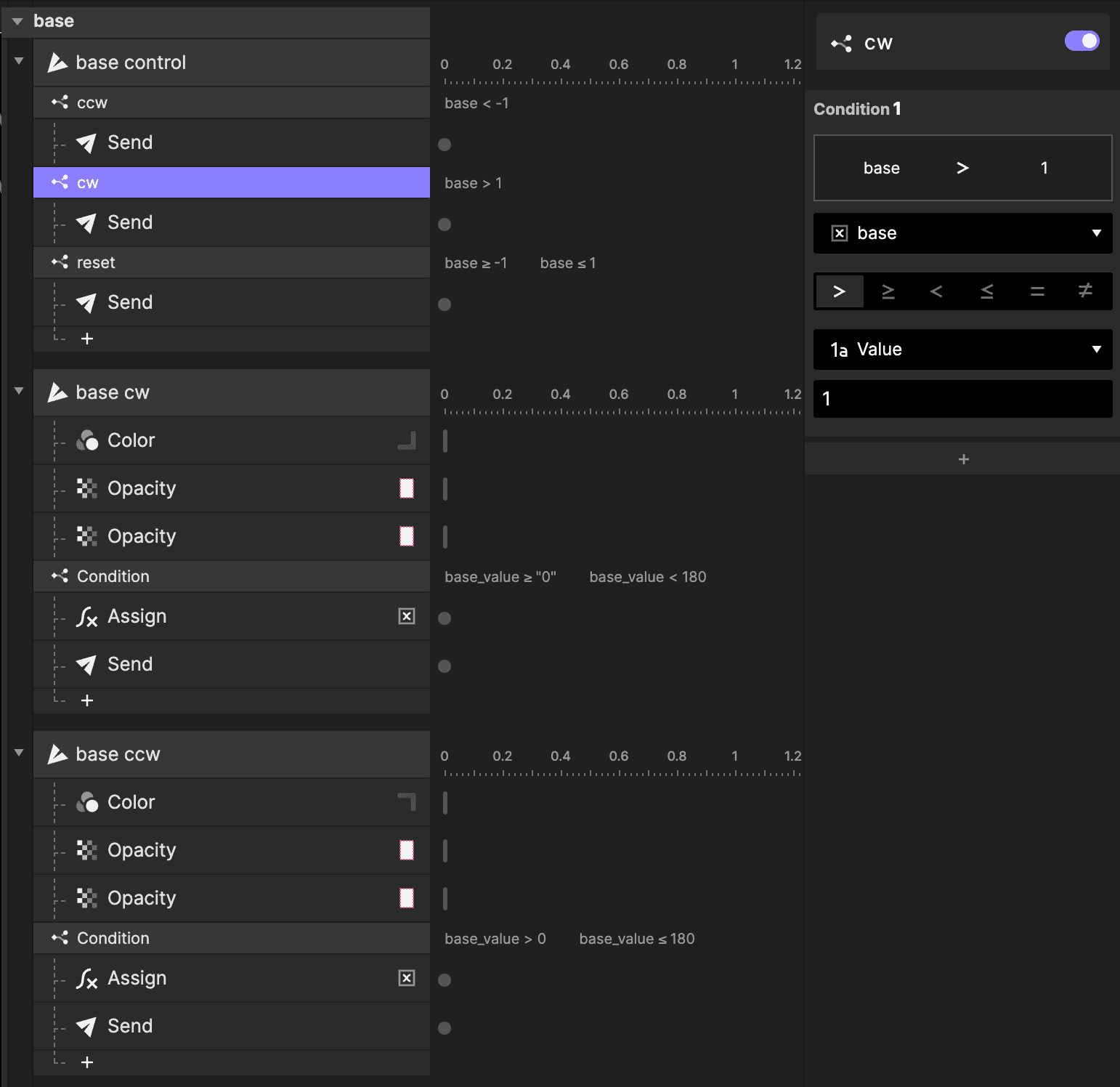
条件会检查该值是否大于 1。
5. 将摄像头画面集成到 UI
最后一步是将实时摄像头画面集成到我们的 UI 中。为实现这一点,你需要一个 node 服务器将 Pie 文件叠加到摄像头画面上。ProtoPie Connect 2.7.0 的发布带来了一项令人兴奋的更新:能够将实时摄像头画面集成到机器人系统中,显著提升其感知和交互功能。
下载源文件,并按照下方视频教程在数字 UI 中创建摄像头画面。
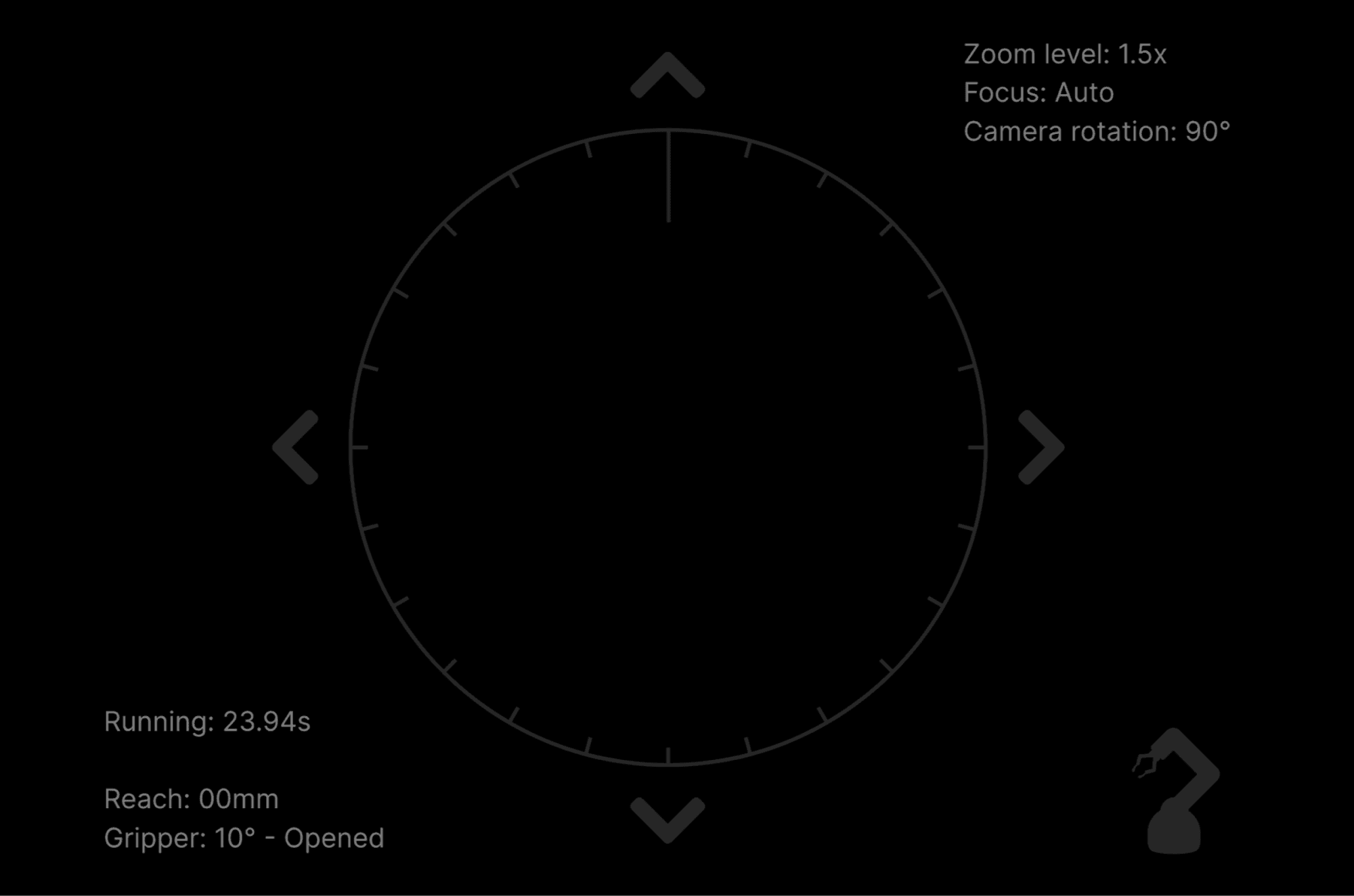
集成摄像头画面后,UI 应该如下面图片所示。
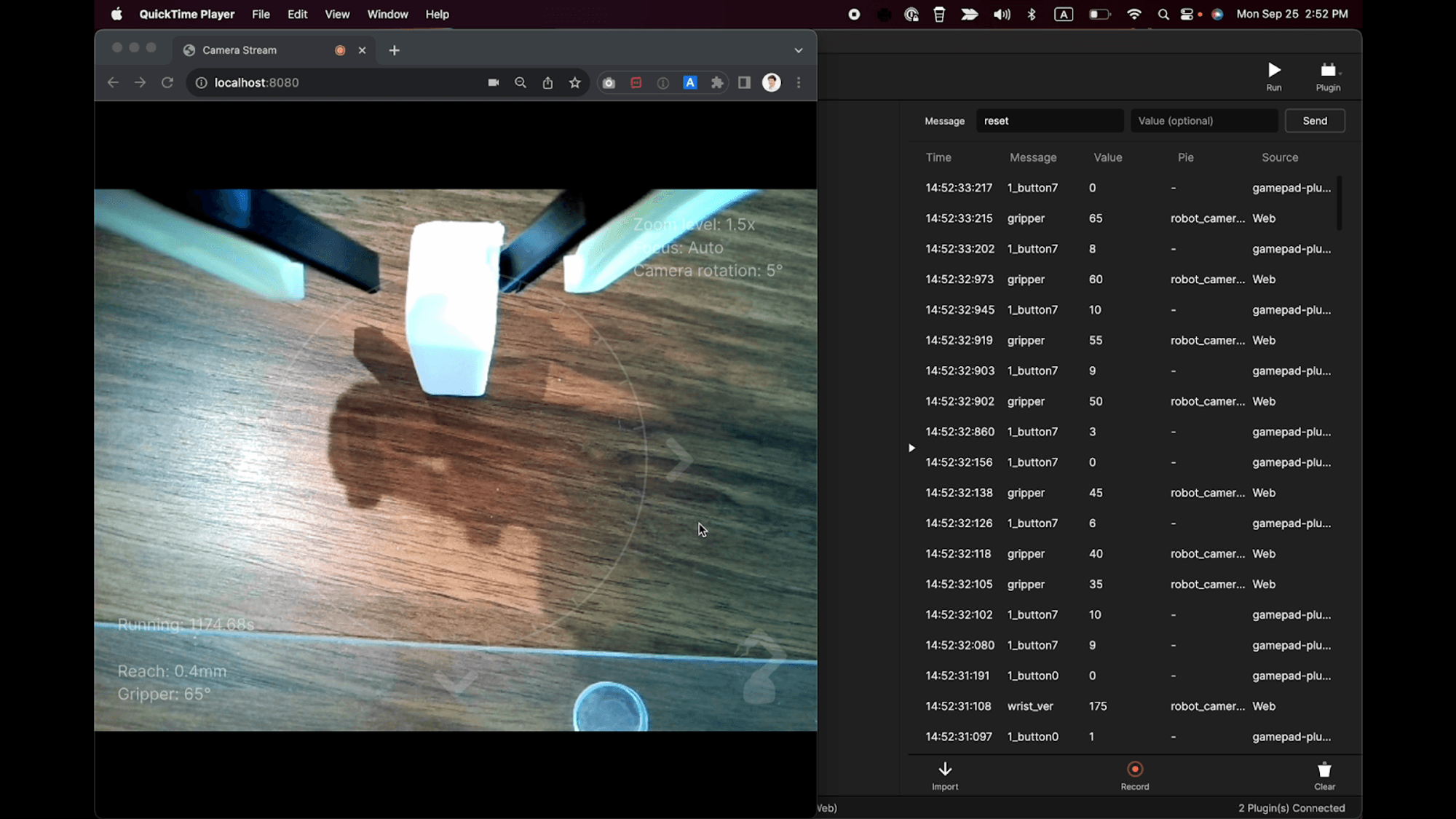
带实时摄像头画面的 UI。
就这样!外科机器人手臂原型完成了
一切就绪!你已成功创建了一个功能完整的机械臂原型。我们非常期待看到你将制作出哪些机器人原型。请在社交媒体上带上 #MadeWithProtoPie 并告诉我们!
塑造机器人与医疗科技的未来
在当今快速发展的医疗科技和机器人世界中,保持领先需要创新工具。ProtoPie 处于高级原型制作的前沿,提供了无与伦比的潜力,重塑机器人及其正在变革的众多行业的未来,例如制造、医疗保健、交通运输、物流等。
立即下载 ProtoPie 并开始使用,或联系一位 ProtoPie 专家获取更多信息。