고급 프로토타이핑은 로보틱스 분야 혁신의 심장 박동이며, 엔지니어, 디자이너, 발명가들이 자신의 아이디어를 실체화된 현실로 바꿀 수 있는 역동적인 플랫폼을 제공합니다.
이러한 로봇은 의료, 제조, 운송, 물류 등 다양한 분야에서 활용되며, 프로토타이핑은 실제 세계의 과제를 해결하는 솔루션을 만드는 데 중요한 단계가 됩니다. 로보틱스 프로토타이핑은 제품 개선을 촉진할 뿐만 아니라 잠재적 위험을 평가하고 관리하는 데에도 중요한 역할을 합니다.
이 글에서는 로보틱스 프로토타이핑에서 ProtoPie의 실용적 활용을 살펴보겠습니다. 그 기능을 보여드리기 위해 MedTech 업계에서 흔히 사용되는 수술용 로봇 팔 프로토타입을 만들어 보겠습니다. 무선 컨트롤러를 사용해 Arduino 로봇 팔을 제어하는 과정을 안내해 드릴 텐데, 이 모든 것이 ProtoPie를 통해 가능해집니다!
개요
로봇 팔을 준비합니다
로봇 팔을 움직이게 하는 방법
무선 컨트롤러 연결
무선 컨트롤러를 Arduino에 연결
UI에 카메라 피드 통합
이제 완료입니다! 수술용 로봇 팔 프로토타입이 완성되었습니다!
로보틱스와 MedTech의 미래를 만들어 가기
💡참고: 우리의 독점 로보틱스 & MedTech 웨비나에서 이 로봇 팔의 라이브 시연을 선보였습니다. 참석하지 못하셨다면, 녹화본을 시청해 ProtoPie가 디자인 과정을 어떻게 간소화하는지 확인하고 효율적인 프로토타이핑을 위한 업계의 모범 사례도 살펴보세요.
1. 로봇 팔을 준비합니다
많은 로보틱스 및 MedTech 기업들로부터 로보틱스 프로토타이핑에서 ProtoPie의 기능에 대한 문의를 받았기 때문에, 우리는 일반적인 사용 사례를 프로토타입으로 구현하는 방법을 시연하기로 했습니다.
시작하기 위해, 우리는 수술용 로봇 팔 프로토타입을 만들기 위해 Arduino Braccio robot arm과 무선 게임패드 컨트롤러를 구입했습니다. 로봇 팔에 ‘의료용 로봇 팔’처럼 보이는 외관을 주기 위해, 부품을 흰색으로 칠했습니다.
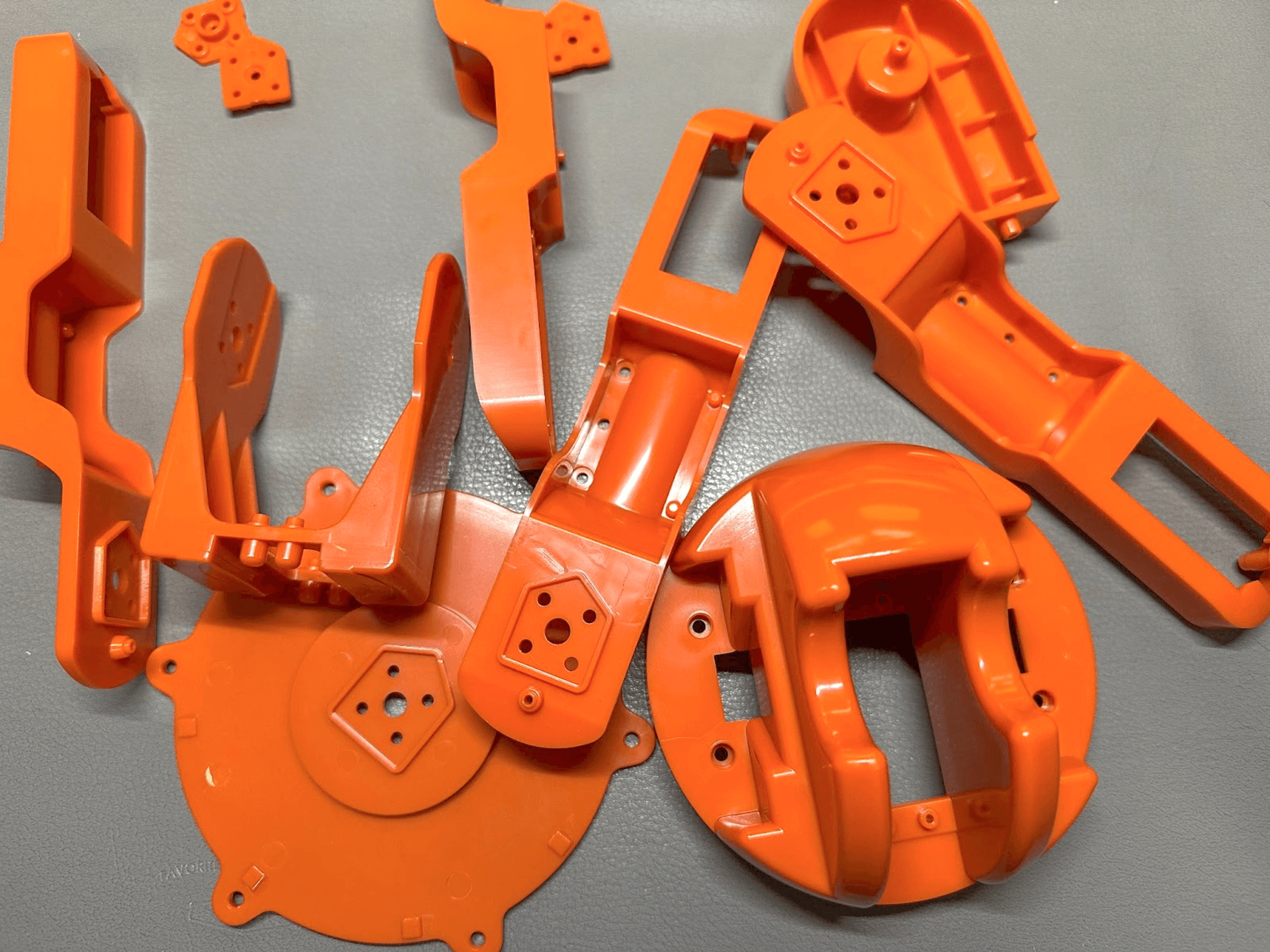
도색 전 로봇 팔.
먼저 회색 바탕색으로 시작했습니다.
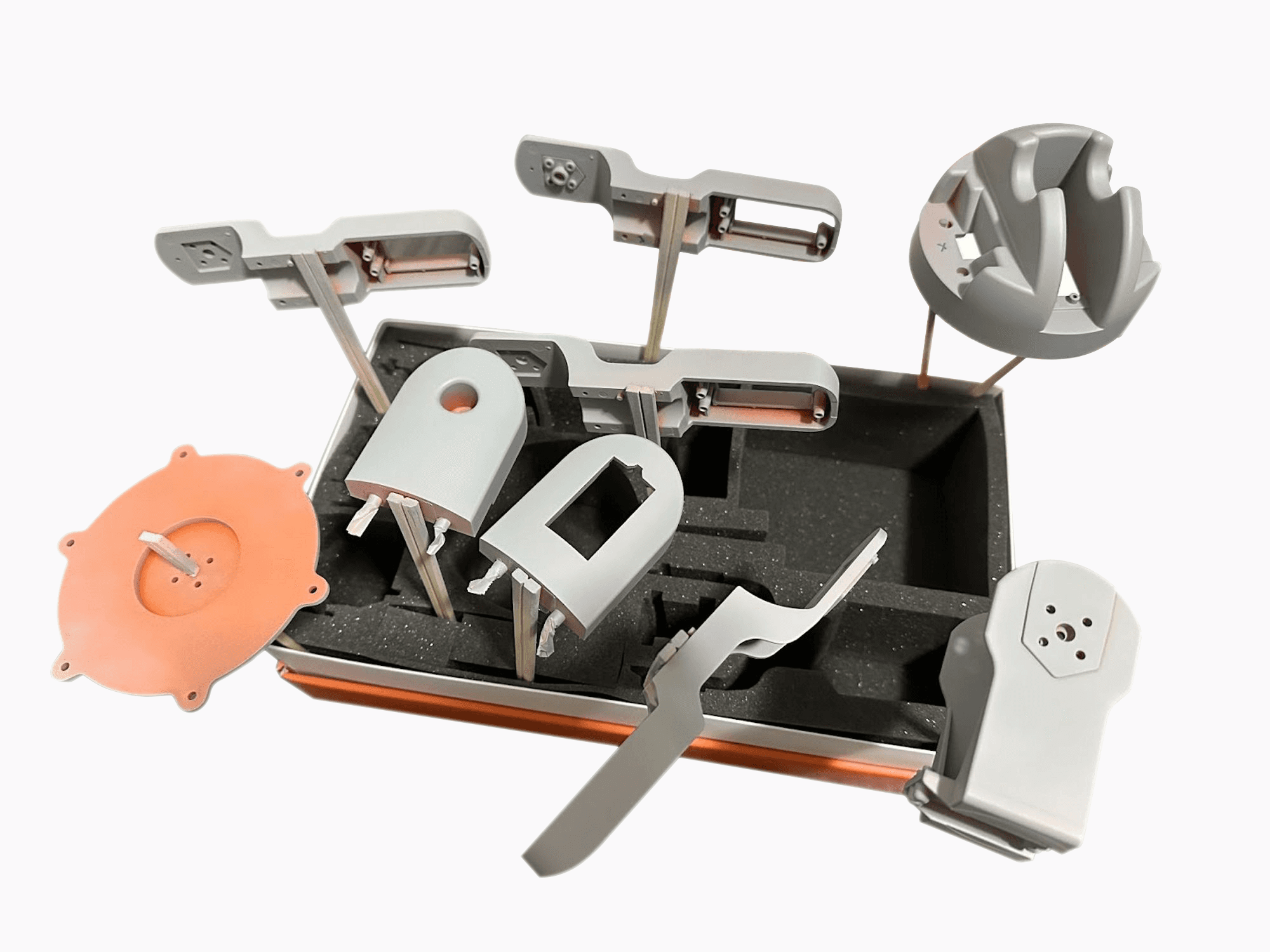
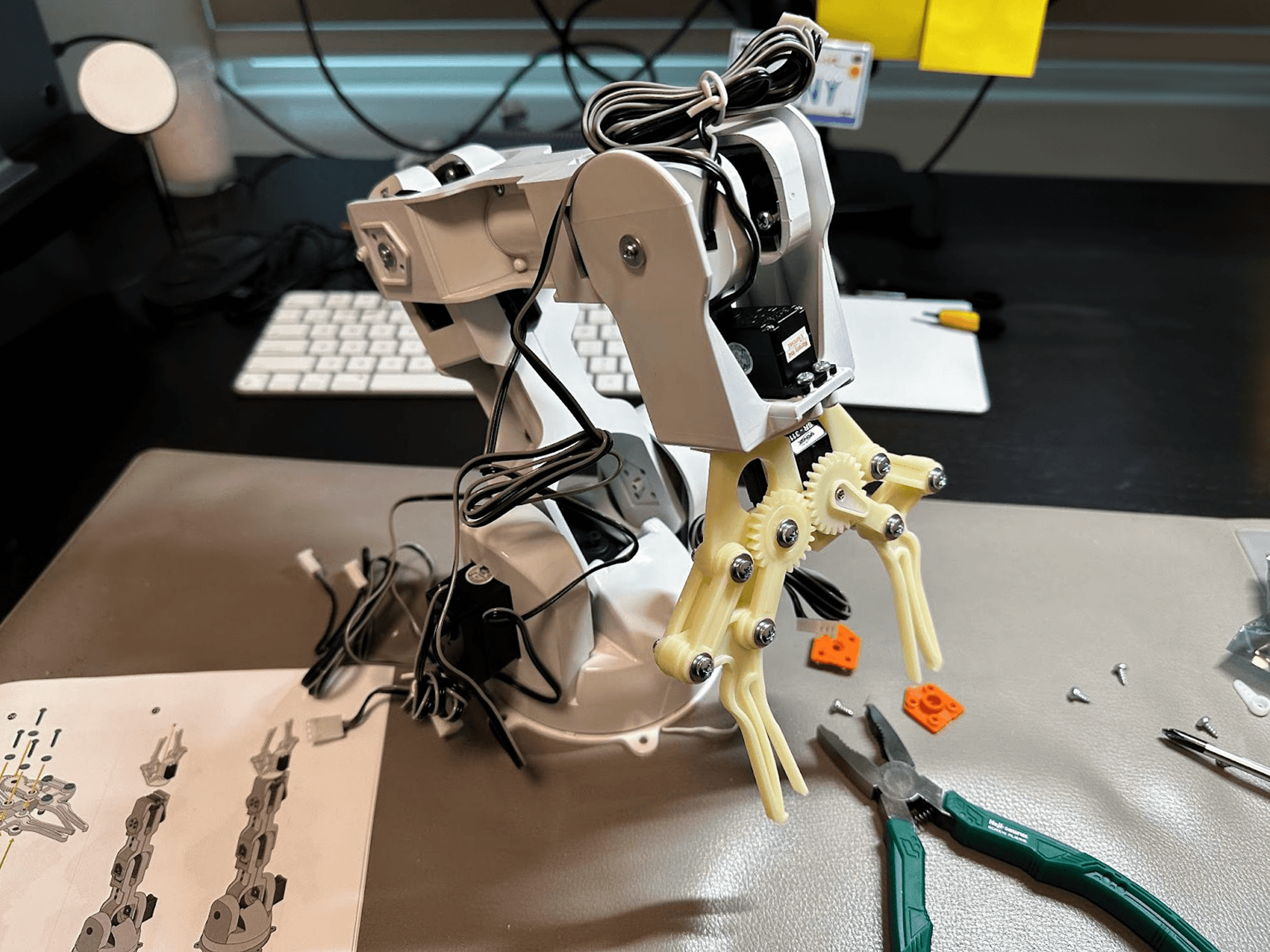
회색 바탕색으로 로봇 팔을 도색하는 모습.
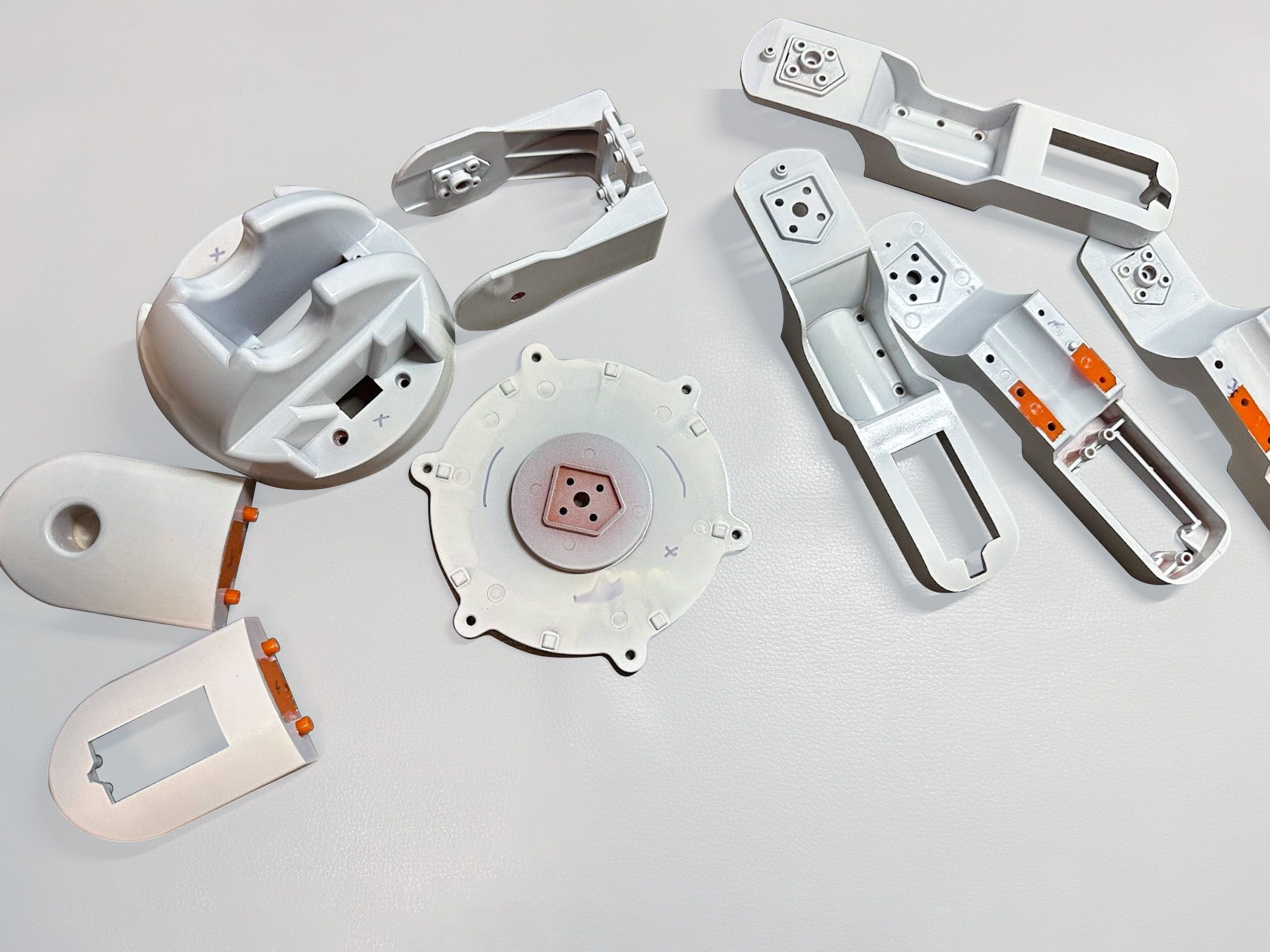
로봇 팔 부품.
마지막으로 로봇 팔 전체를 흰색으로 칠했습니다. 로봇 팔 부품은 함께 제공된 설명서를 따라 쉽게 조립할 수 있습니다.
흰색 로봇 팔 프로토타입.
수술용 로봇에는 환자와 주변 환경을 모니터링하는 카메라가 있기 때문에, 우리는 그리퍼 끝부분에 USB 카메라 모듈을 부착했습니다. 그런 종류의 USB 카메라는 온라인에서 쉽게 구입할 수 있습니다.
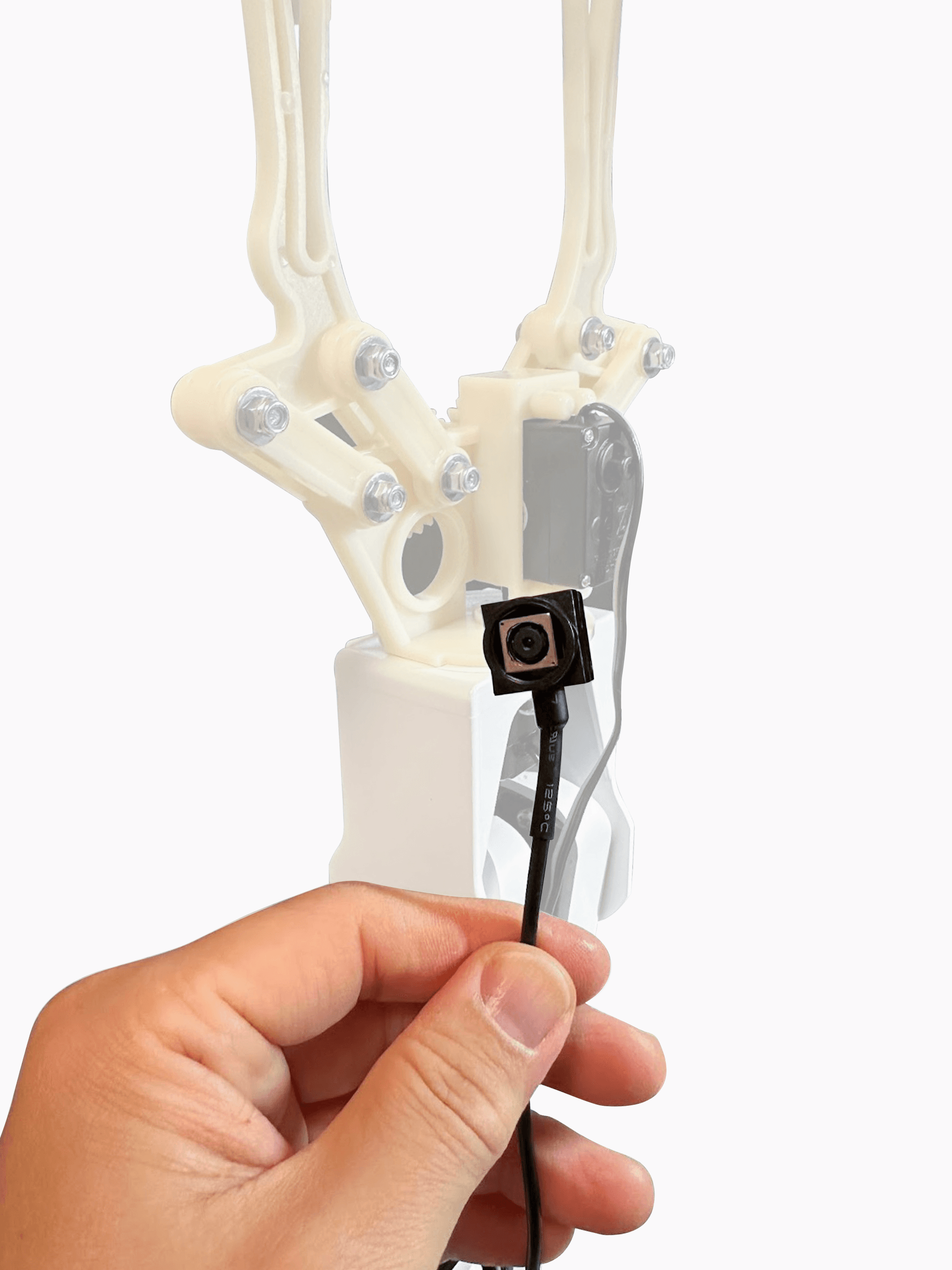
USB 카메라.
우리가 사용한 로봇 팔 키트에는 Arduino 보드가 포함되어 있지 않았기 때문에, 별도로 준비해야 했습니다. 우리는 Arduino UNO R3를 사용했고 보드 실드와 함께 조립했습니다. 이렇게 해서 이 의료용 프로토타입의 하드웨어 준비가 완료되었습니다.
2. 로봇 팔을 움직이게 하는 방법
로봇 팔을 제어하면서 Arduino 예제 코드를 사용하고 ProtoPie Connect에서 메시지를 수신할 수 있습니다. 예제 코드를 복사해 Arduino 보드에 업로드하기만 하면 됩니다.
더 자세히 알고 싶다면 다음 자료를 참고하세요:
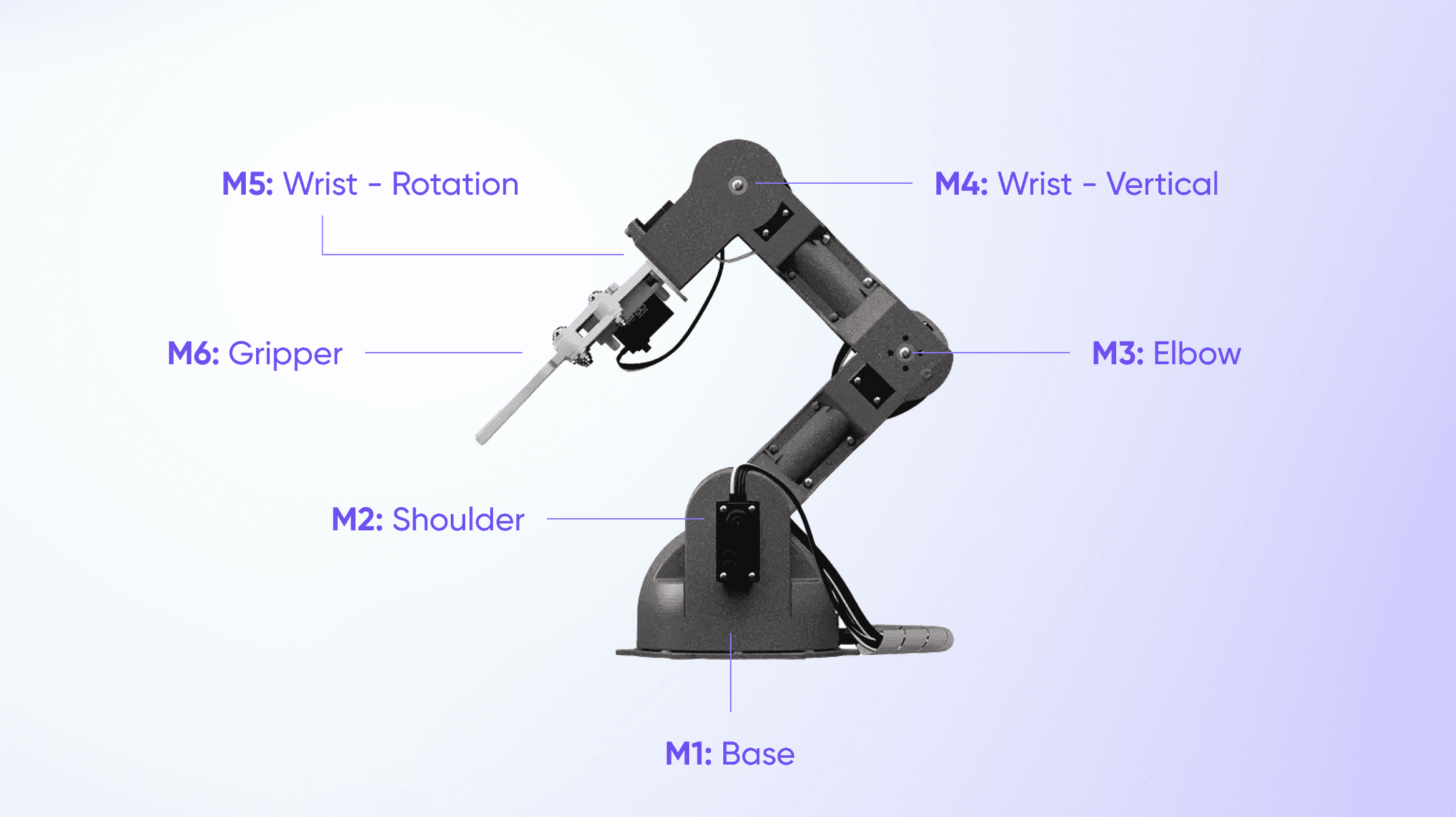
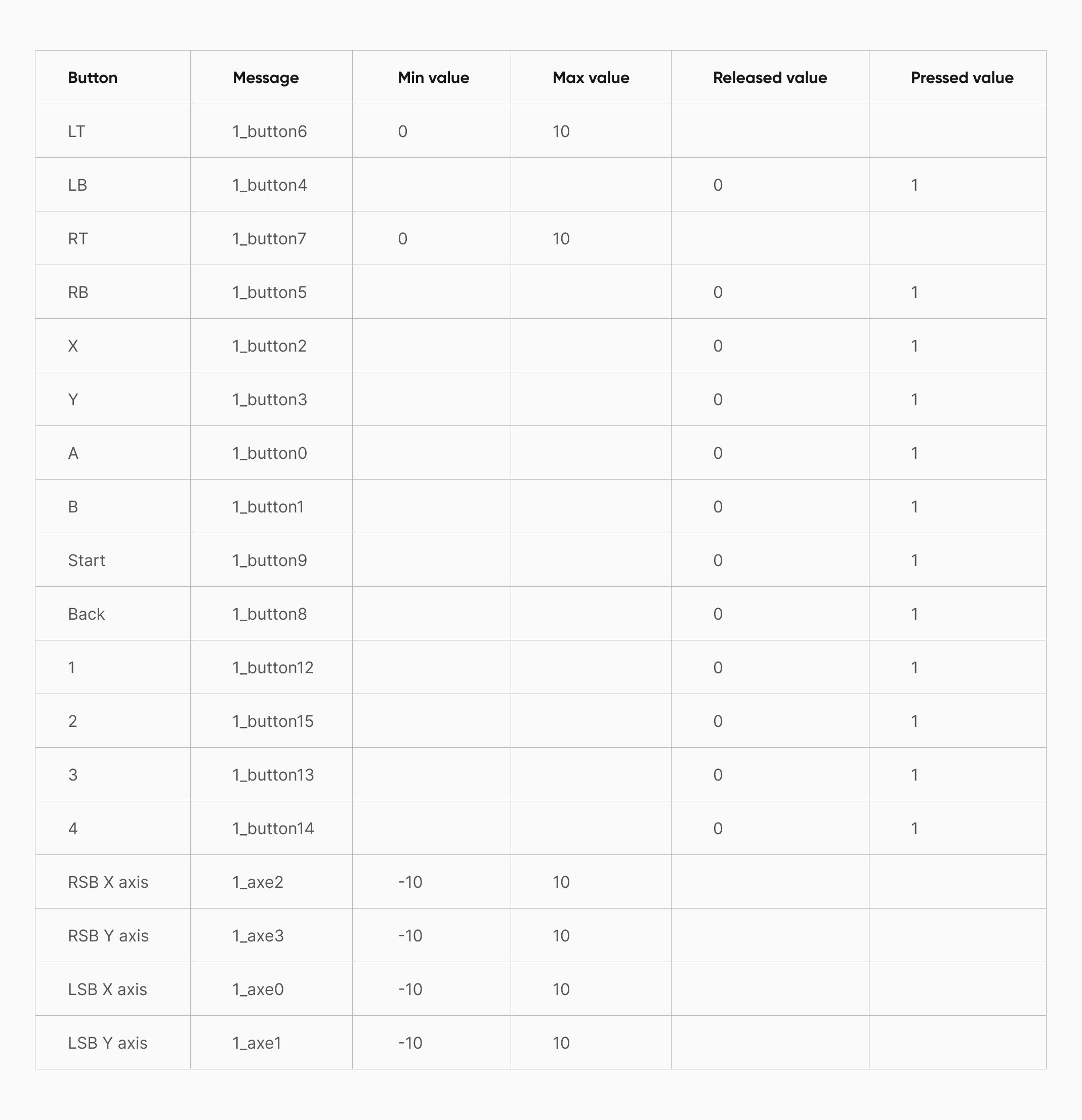
로봇 팔에는 6개의 서보 모터가 있습니다. ProtoPie Connect를 통해 메시지를 보내 각 서보 모터를 제어할 수 있습니다.
로봇 팔 신호는 아래 표를 참고하세요.
로봇 팔 신호.
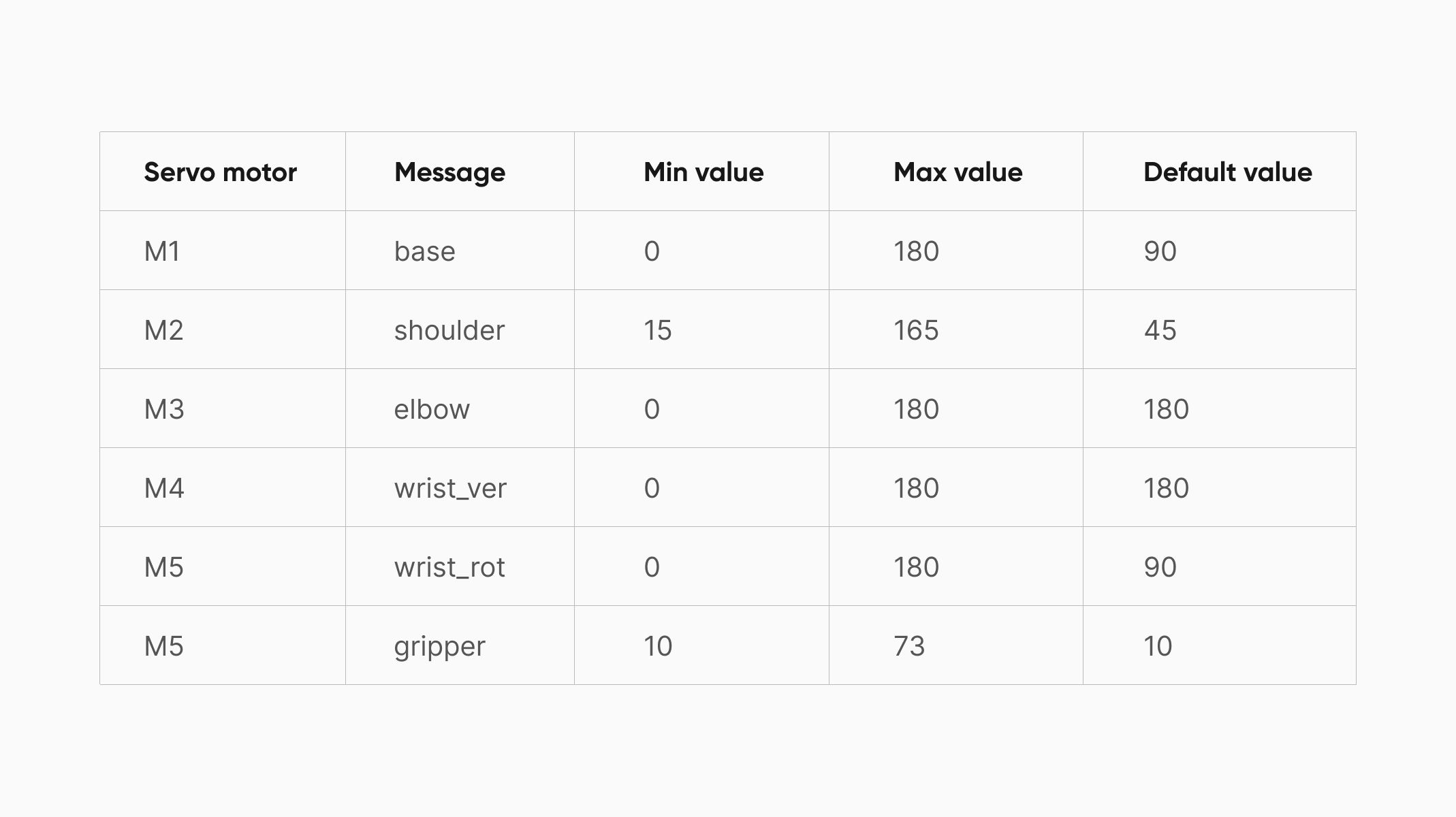
로봇 팔 신호.
다음으로, USB 케이블로 Arduino 보드를 노트북에 연결하고 ProtoPie Connect를 실행합니다. Plugin → Arduino → Port → 로 이동한 다음 USB 포트를 선택하세요.
다음으로, Arduino 플러그인의 ‘Run’ 버튼을 눌러 활성화합니다.
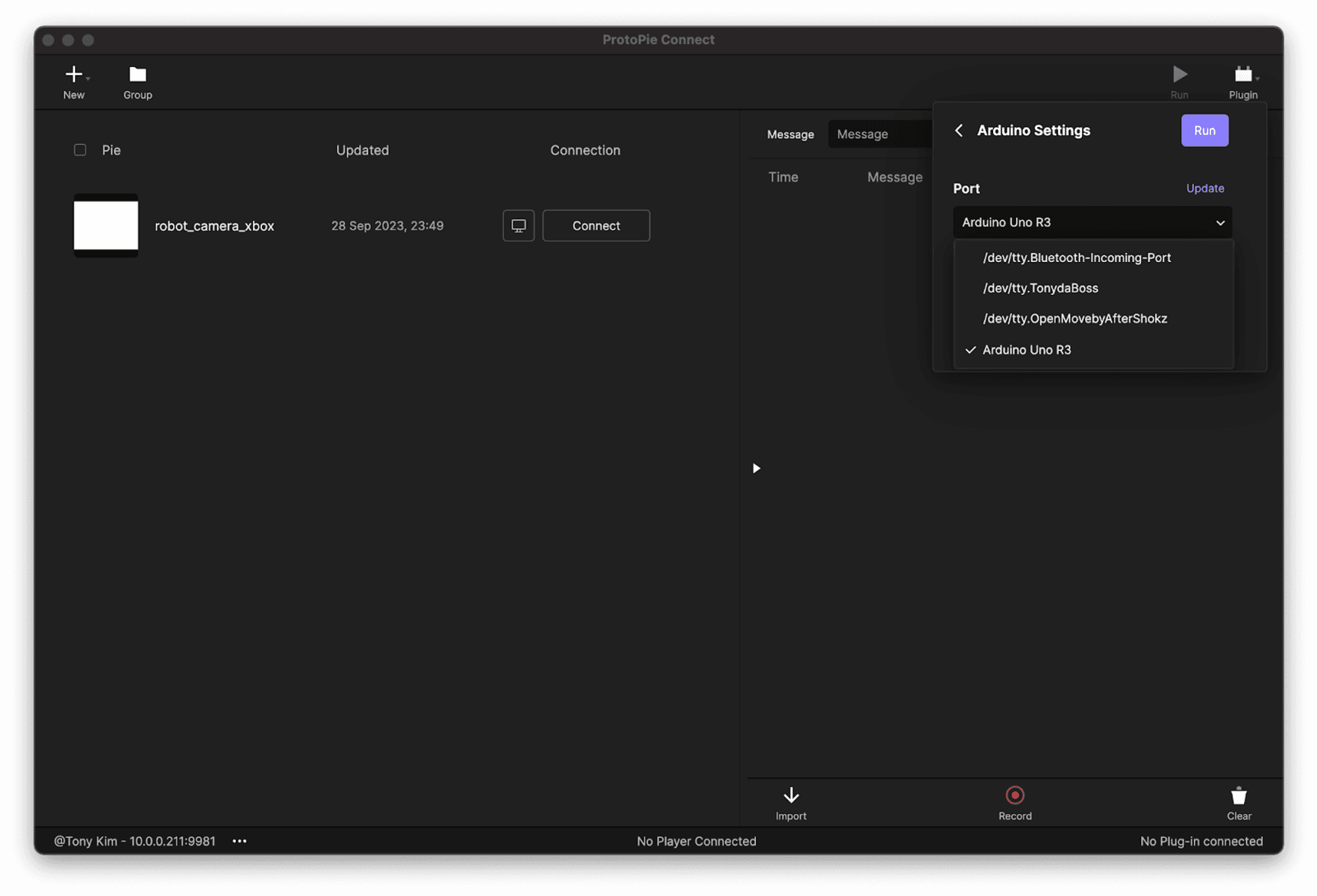
Arduino 연결.
메시지를 보내 제대로 작동하는지 테스트합니다. 예를 들어, base, value: 45.라는 메시지로 테스트할 수 있습니다.
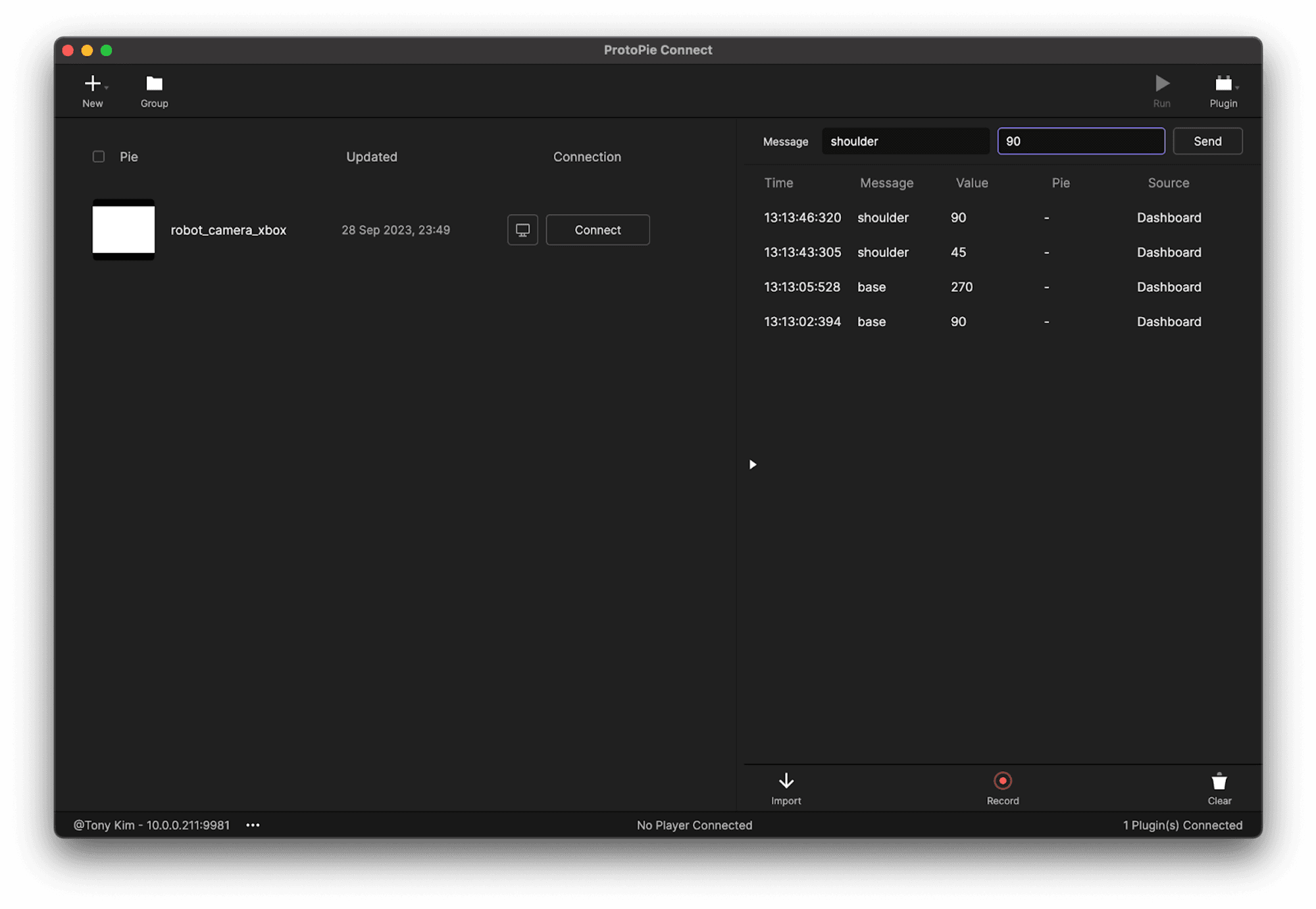
테스트 메시지.
테스트 메시지.
원래 위치로 재설정하려면 “reset”을 입력할 수도 있습니다.
3. 무선 컨트롤러 연결
이제 블루투스를 통해 무선 컨트롤러를 노트북에 연결할 차례입니다.
게임패드에서 신호를 받으려면 게임패드 플러그인을 실행해야 합니다. gamepad 플러그인에 대해 자세히 알아보세요.
무선 컨트롤러가 연결되고 게임패드 플러그인이 실행되면, ProtoPie Connect가 신호를 수신할 수 있습니다. 아래 표는 게임 컨트롤러의 신호를 보여줍니다.

콘솔.
컨트롤러 신호.
4. 무선 컨트롤러를 Arduino에 연결
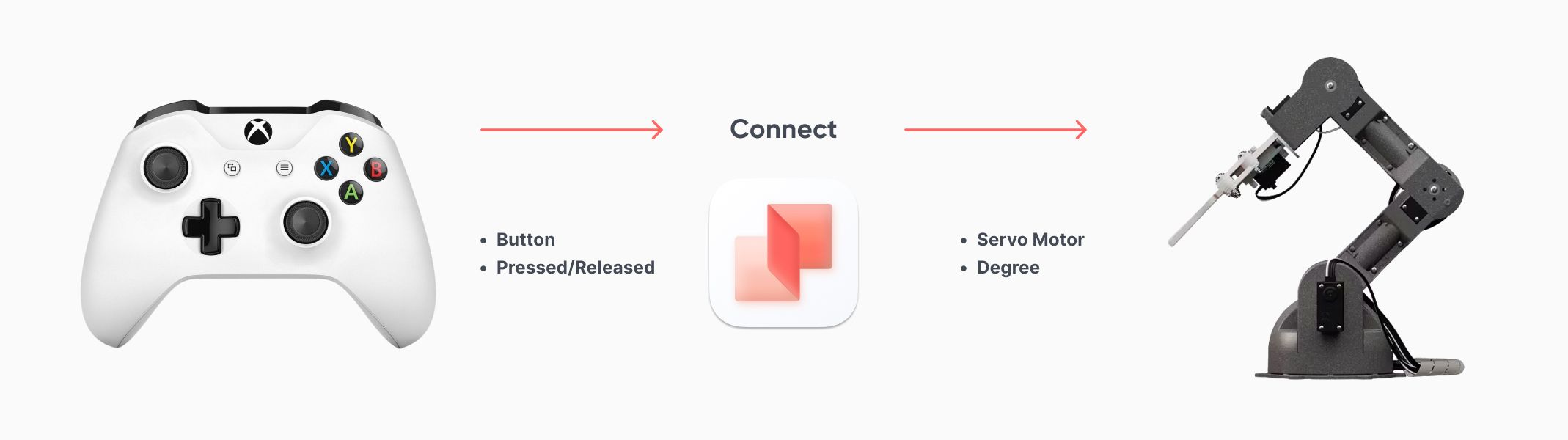
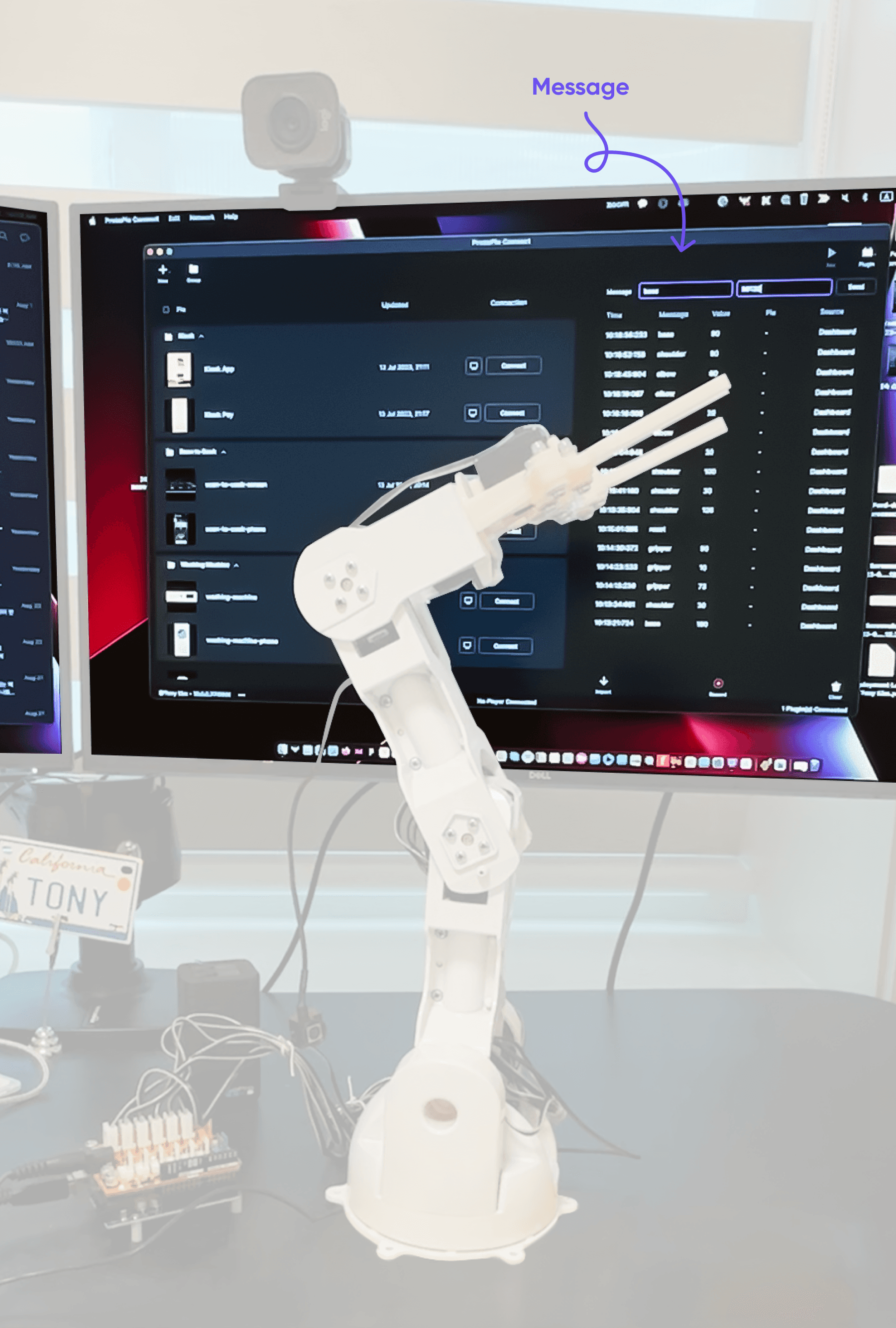
ProtoPie Connect가 로봇 팔과 컨트롤러를 연결하고 있습니다.

컨트롤러.
게임 컨트롤러를 연결했으므로, ProtoPie Connect는 게임 컨트롤러의 신호를 수신해 Arduino로 전송합니다.
ProtoPie를 사용해 로봇 팔을 제어하고 게임 컨트롤러와 Arduino 사이에 주고받는 신호를 해석하는 디지털 사용자 인터페이스를 프로토타입으로 제작했습니다. 아래 제공된 Pie 파일을 열어 자세히 살펴보고 다운로드할 수 있습니다.
UI.
로봇 팔의 베이스 부분(M1 서보 모터)을 제어하려면 오른쪽 엄지 스틱(RSB)을 왼쪽 또는 오른쪽으로 움직이면 됩니다. 그러면 게임패드는 스틱 움직임에 따라 값이 -10에서 10 사이인 메시지(1_axe2 )를 보냅니다.
ProtoPie Connect는 이 메시지를 수신하고, UI 프로토타입(Pie)은 값이 양수인지 음수인지 판별합니다. 양수는 베이스가 시계 방향으로 회전함을 의미하고, 음수는 반시계 방향으로 회전함을 의미합니다. 다음으로 Pie는 값이 (현재 각도 ± 5)인 메시지(base)를 보냅니다.
Arduino로 제어되는 로봇 팔은 이 메시지를 수신해 이해하고, 그에 따라 움직이기 시작합니다. 따라서 게임 컨트롤러의 오른쪽 엄지 스틱을 움직이면 로봇 팔의 베이스 회전을 제어할 수 있습니다.
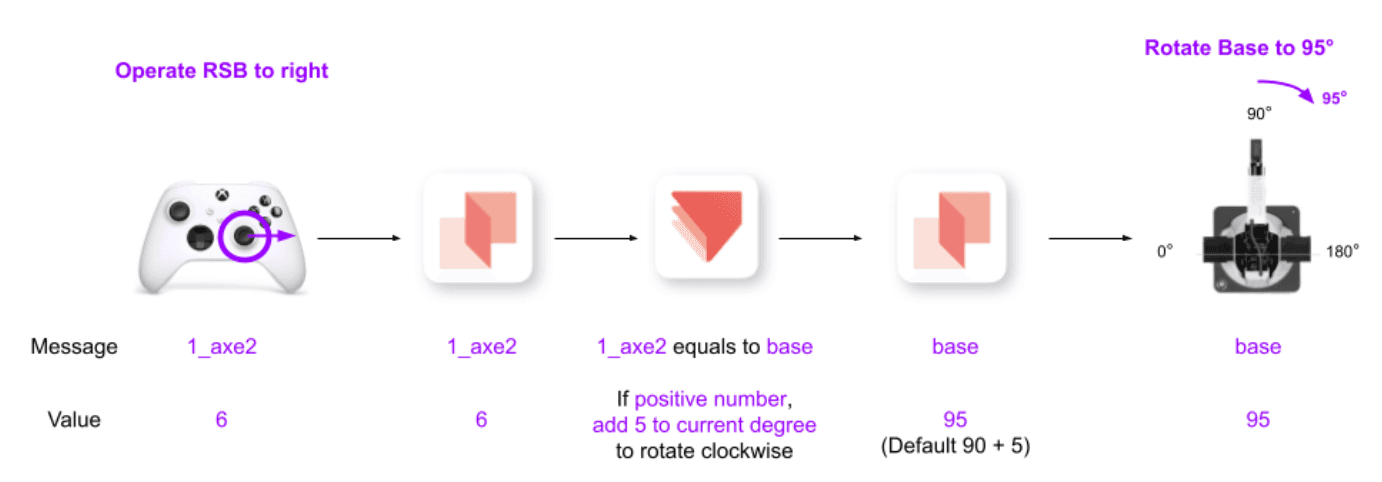
Pie가 로봇 팔이 이해할 수 있도록 컨트롤러의 메시지와 값을 해석합니다.
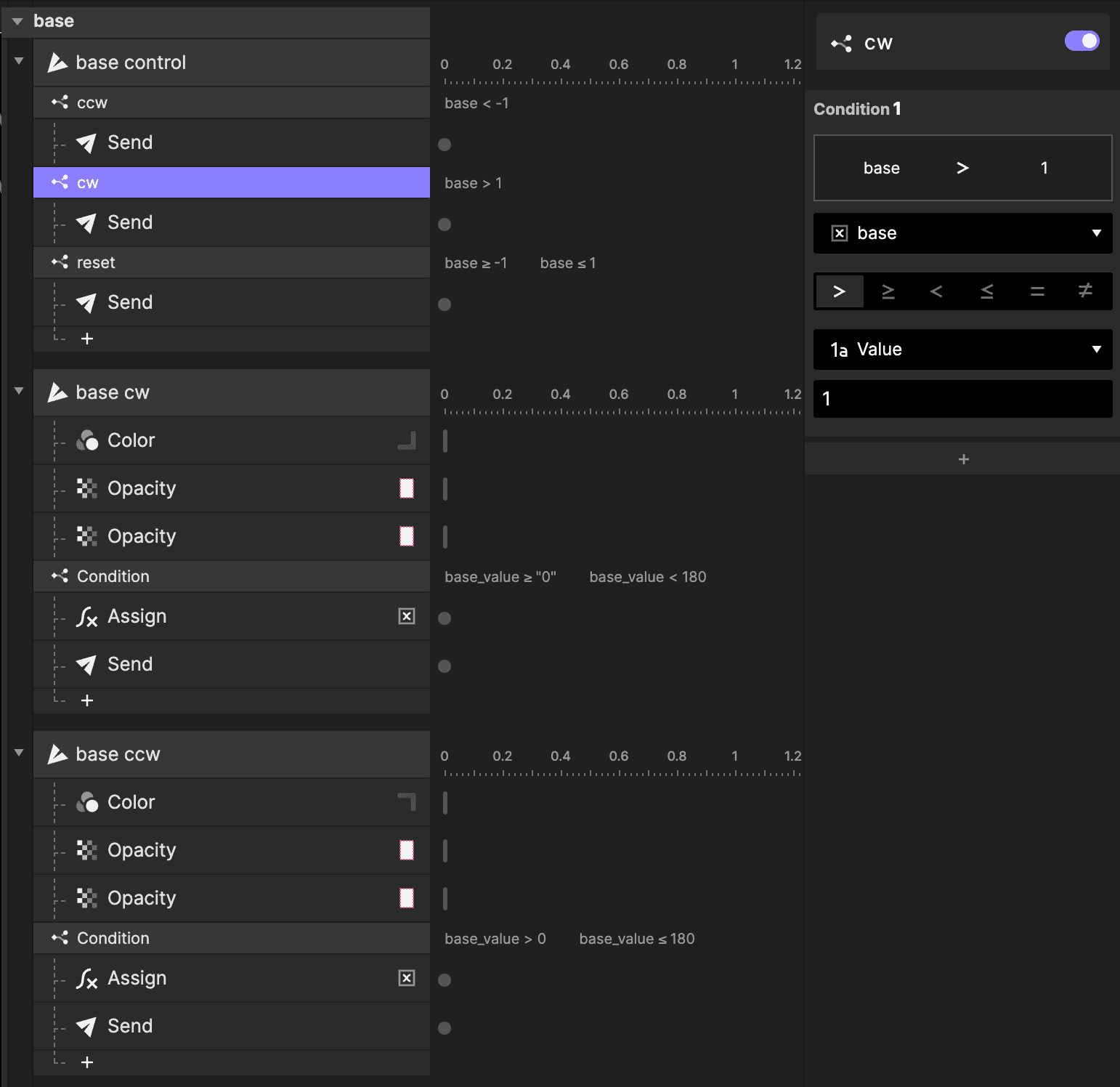
조건은 값이 1보다 큰지 확인합니다.
5. UI에 카메라 피드 통합
마지막 퍼즐 조각은 라이브 카메라 피드를 UI에 통합하는 것입니다. 이를 위해서는 카메라 피드 위에 Pie 파일을 오버레이할 노드 서버가 필요합니다. ProtoPie Connect 2.7.0의 출시는 흥미로운 업데이트를 가져왔습니다. 바로 라이브 카메라 피드를 로보틱스 시스템에 통합할 수 있는 기능으로, 인지 및 상호작용 기능을 크게 향상시킵니다.
아래의 소스 파일을 다운로드하고, 아래 영상 튜토리얼을 따라 디지털 UI에 카메라 피드를 만들어 보세요.
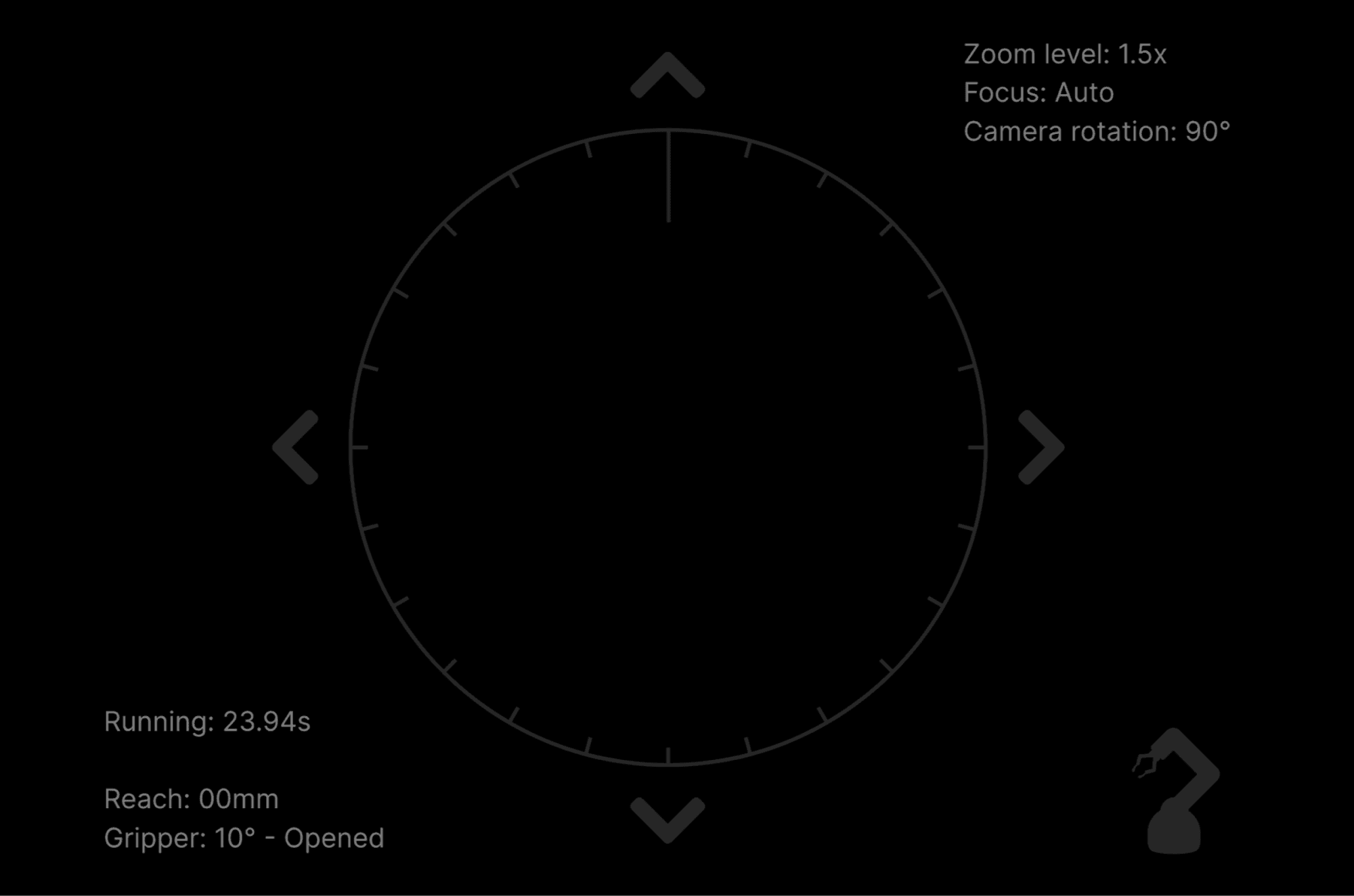
카메라 피드를 통합한 후 UI는 아래 이미지와 같아야 합니다.
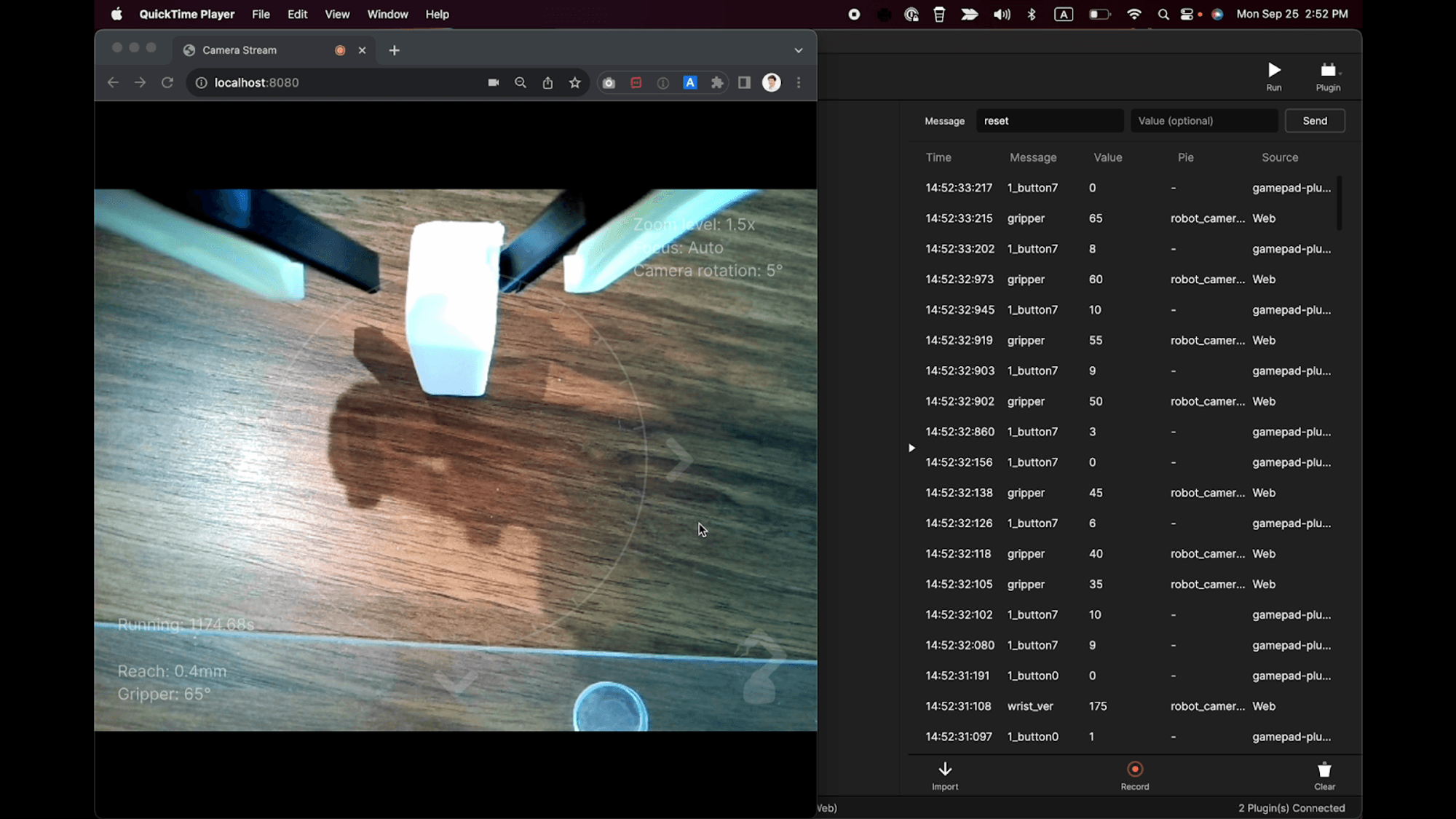
라이브 카메라 피드가 있는 UI.
이제 완료입니다! 수술용 로봇 팔 프로토타입이 완성되었습니다
이제 모두 완료되었습니다! 완전히 작동하는 로봇 팔 프로토타입을 성공적으로 만들었습니다. 여러분이 어떤 로보틱스 프로토타입을 만들게 될지 정말 기대됩니다. 소셜 미디어에 #MadeWithProtoPie를 태그하고 알려 주세요!
로보틱스와 MedTech의 미래를 만들어 가기
오늘날 빠르게 진화하는 MedTech와 로보틱스의 세계에서 한발 앞서 나가려면 혁신적인 도구가 필요합니다. ProtoPie는 고급 프로토타이핑의 최전선에 서 있으며, 현재 제조, 의료, 운송, 물류 등 수많은 산업을 혁신하고 있는 로보틱스의 미래를 재구성할 수 있는 비할 데 없는 잠재력을 제공합니다.
지금 ProtoPie를 다운로드하고 시작하거나, 더 자세한 정보를 원하시면 ProtoPie 전문가와 상담해 보세요.